تبدیل رباتهای بدون مغز به 'شگفتیحلکننده ماز' با فیزیک ساده

پژوهشگران راهی برای کنترل رباتهای کوچک دو اینچی بدون استفاده از کامپیوتر پیدا کردهاند که امکانات جدیدی برای گروههای ربات در زمینههایی مانند نظارت و کاوش فضایی باز میکند.
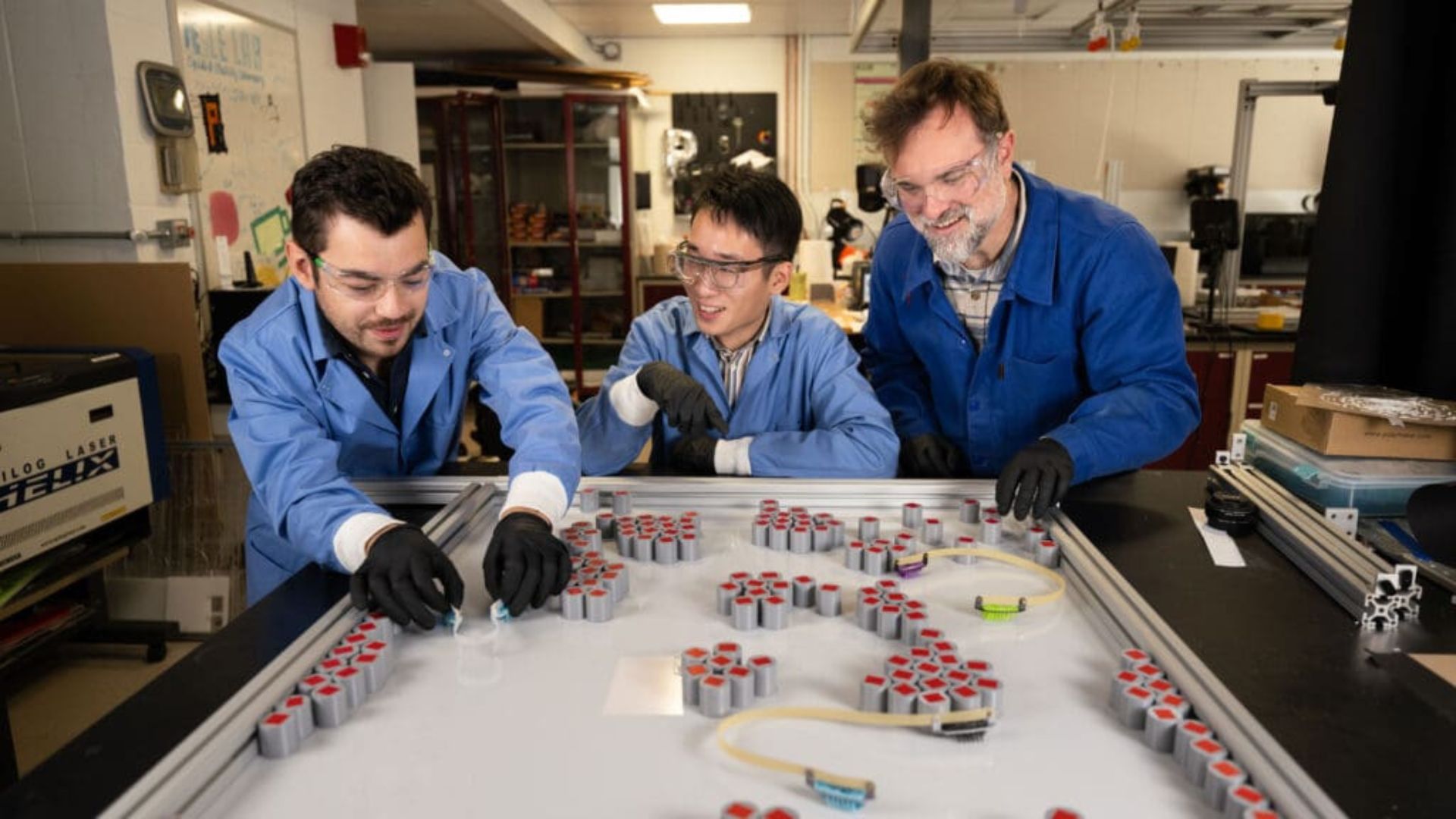
تیمی در دانشگاه مهندسی پرینستون این «رباتهای برستل» - رباتهای ساده با موتورهای لرزان و پاهای انعطافپذیر - را با استفاده از یک تسمه پلیمری انعطافپذیر متصل کردند.
به گفته پژوهشگران، این امر به دانشمندان این امکان را داد که «محاسبات مورفولوژیکی» را انجام دهند، به این معنا که رباتها از ویژگیهای فیزیکی خود به جای دستورهای دیجیتالی برای حل مشکلات پیچیده استفاده میکنند.
این روش به رباتها اجازه میدهد تا بدون هیچ برنامهنویسی همچون یک گروه تعامل و حرکت کنند و روشهایی برای همکاری آینده گروههای رباتهای ساده به صورت خودمختار ارائه میدهد.
«ما خواستیم عاملهای بدون مغز را به رفتارهای پیچیده وادار کنیم»، گفته پییر-توماس برون، دانشیار مهندسی شیمی و زیستی و سرپرست تیم تحقیقاتی در دانشگاه مهندسی پرینستون، در بیانیه .
الگوهای حرکتی مصنوعی
سیستمهای فعال، مانند گروههای پرندگان، مدارس ماهی یا گروههای باکتری، اغلب حرکات سازمانیافتهای ایجاد میکنند که پیچیده به نظر میرسند ولی به طور طبیعی به وجود میآیند. این رفتار در بسیاری از مقیاسها، از باکتریهای کوچک تا گروههای بزرگ حیوانات، رایج است.
در محیطهای مصنوعی، پژوهشگران این رفتارها را با رباتهای «بدون مغز» خودحرکت تقلید میکنند که به سیگنالهای خارجی یا مرزهای انعطافپذیر پاسخ میدهند تا الگوهای منحصر به فردی شکل دهند. در این سیستمها، هر واحد از انرژی استفاده میکند تا به صورت مستقل حرکت کند و با این حال به صورت گروهی الگوهای هماهنگ را تشکیل میدهد، همانطور که در گلههای سارها یا رباتهای گروهی مشاهده میشود.
با این حال، دستیابی و مدیریت این حرکات چالشبرانگیز است زیرا به عوامل زیادی نیاز دارد که برای شروع حرکت گروهی باید با هم عمل کنند. بهطور اساسی، سیستمهای ماده فعال نشان میدهند که چگونه چندین واحد ساده میتوانند با هم تعامل داشته باشند تا بدون کنترل مرکزی رفتارهای کاملاً هماهنگ و پویا را تولید کنند.
تیم کنجکاو بود بداند که آیا رفتار پیچیده ممکن است بدون استفاده از نور یا اشارات خارجی دیگر تولید شود. آنها قصد داشتند از هوش مکانیکی، که زمانی رخ میدهد که سیستمهای فیزیکی به مشکلات مشابه دستی که توپ را میگیرد، بپردازند.
پیشرفت رباتیک گروهی
پژوهشگران از پرینتر سهبعدی برای تولید کابل انعطافپذیری استفاده کردند که کلید اصلی بود. آنها با تسمههای متنوعی از نظر انعطافپذیری و سختی آزمایش کردند.
آنها از دوربینها برای ردیابی رباتها استفاده کردند و مدلهای ریاضی توسعه دادند که رفتار رباتهای زوج شده را با توجه به عواملی مانند نیروی رباتها و طول و انعطافپذیری تسمه پیشبینی میکرد.
سپس، تیم یک تسمه به لبه جلویی هر میکروبات مستطیلی در هر پیکربندی متصل کرد. دو ربات وقتی که از سختترین تسمه - اساساً، یک تیر پلیاستر محکم - استفاده میکردند، به سختی حرکت کردند. با این حال، زمانی که رباتها هل دادند، تسمهها شروع به تسلیم شدن کردند و پژوهشگران پلیاستر را انعطافپذیرتر کردند.
بعد از یادگیری کنترل حرکت رباتهای زوج شده، پژوهشگران توانایی آنها را در جهتیابی در مقابل موانع آزمایش کردند. وقتی که رباتها به دیواری برخورد کردند، تسمه U شکل صاف شد و باعث شد که یکی از رباتها در امتداد دیوار سر بخورد. سپس تسمه در جهت جدیدی منحنی شد و به رباتها اجازه داد تا از دیوار دور شوند و به کاوش قسمتهای محدود بپردازند. این رفتار انطباقی همچنین رباتها را قادر ساخت تا از میان مازها عبور کنند.
علاوه بر توسعه تکنیکهایی برای گروهبندی اشیاء متفاوت بر روی یک میز، پژوهشگران همچنین به قابلیت رباتها در جابجایی در فضاهای کوچک پرداختند.
این پژوهش ابتدا به عنوان یک پایاننامه کارشناسی ارشد پاسخ یک ربات به حرکت را در شرایطی که به یک تیر الاستیک متصل شده بود بررسی کرد. بعداً، پژوهشگران متوجه رفتارهای خودسازماندهی غیرمنتظرهای شدند زمانی که دو ربات را با یک کابل انعطافپذیر متصل کردند.
تیم تحقیقاتی قصد دارد به بهبود فناوری تسمه برای بررسی رفتارها و ترکیبات جدید با گروههای بزرگتر از رباتهای با تسمه متصل ادامه دهد. آنها همچنین به استفاده از این استراتژی در پهپادهای سهبعدی قابل پیمایش فکر میکنند که میتواند استفاده از این مفاهیم خودسازمانده را گسترش دهد.
جزئیات پژوهش تیم در مجله Proceedings of the National Academy of Sciences منتشر شد.