
تکنولوژی

ربات جدید MIT با یک دست کدو را به آرامی پوست میکند و با دست دیگر آن را نگه میدارد
محققان MIT رباتی توسعه دادهاند که میتواند به راحتی وظایف آشپزخانهای مانند پوست کندن سبزیجات را انجام دهد. دستگاه جدید میتواند کدو را با یک دست بگیرد و با دست دیگر آن را پوست کند. همچنین قابلیت چرخش میوهها و سبزیجات با کمک انگشتان خود را دارد. این تحقیق بر مشکلات دستکاری دقیق متمرکز شده و نشان میدهد که سیستمهای کنترلی مورد استفاده در دستهای رباتیک میتوانند برای سایر وظایف نیز به کار روند.
محققان MIT ربات جدیدی توسعه دادهاند که میتواند به راحتی وظایف آشپزخانهای مانند پوست کندن چندین سبزیجات را انجام دهد. در یک ویدیوی اخیر، ربات در حالی که با یک دست کدو را نگه میدارد، با دست دیگر آن را پوست میکند. با استفاده از انگشت خود، سیستم رباتیک میتواند میوهها و سبزیجات را به راحتی بچرخاند و با دست دیگر آنها را پوست کند.
ربات مشکلات دستکاری دقیق را بررسی میکند
مطالعات اخیر پیشرفتهای قابل توجهی در رفع مشکلات دستکاری دقیق ، به ویژه در بازآرایی اشیاء در دست به دست دادهاند. با این حال، تعداد کمتری از تحقیقات موجود به بررسی استفاده از سیستمهای کنترلی دستکاری دقیق توسعه یافته برای وظایف دیگر پرداختهاند. در این مطالعه جدید، محققان MIT بر دستکاری دقیق محدود شده برای پوست کردن متمرکز شدهاند. پوست کردن مواد غذایی محدودیتهای مختلفی را بر کنترل بازآرایی اعمال میکند، مانند ضرورت نگه داشتن محکم شیء پس از بازآرایی برای فرآیند پوست کردن.
"ما یک سیستم ساده برای یادگیری یک سیستم کنترلی بازآرایی معرفی میکنیم که وظیفه پوست کردن پس از آن را تسهیل میکند،" محققان گفتند.
انسانها با گرفتن یک سیبزمینی در یک دست و استفاده از دست دوم برای عمل آوردن پوستهگیر برای برداشتن پوست سیبزمینی آن را پوست میکنند. پس از پوست کندن قسمتی از سیبزمینی، آن را در حالی که در دست خود نگه میدارند میچرخانند (یعنی دستکاری در دست) و دوباره پوست آن را میکنند. این فرایند چرخاندن و پوست کردن ادامه مییابد تا تمام پوست سیبزمینی برداشته شود.
سیستم رباتیک میتواند سبزیجات مختلف را بازآرایی کند
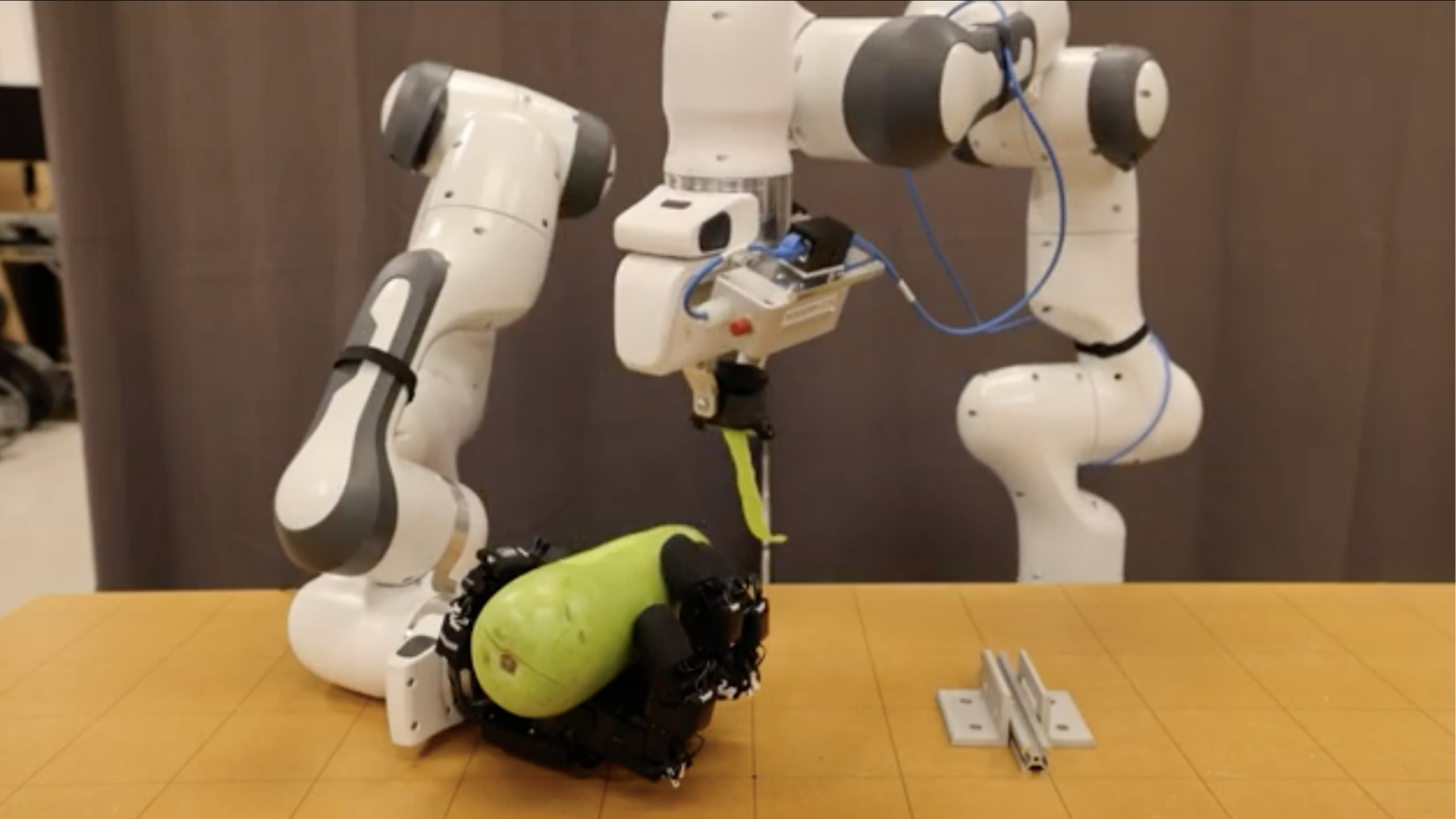
"در این کار، ما یک سیستم رباتیکی را معرفی میکنیم که میتواند سبزیجات مختلف را با استفاده از یک دست آلگرو به نحوی بازآرایی کند که پوسته آنها با یک دست دیگر پوست گرفته شود." محققان گفتند. سیستم دستکاری دقیق که از یک دست آلگرو نصب شده بر روی یک بازوی ربات فرانکا برای بازآرایی مواد غذایی برای پوست کردن استفاده میکند. بازوی ربات دیگر فرانکا از گیره خود برای گرفتن یک پوستهگیر برای پوست کندن استفاده میکند. کنترلر بازآرایی برای دست آلگرو از طریق یادگیری تقویتی یاد گرفته میشود، در حالی که پوست کندن از طریق تلهاپریشن انجام میشود. محققان فرایند بازآرایی و پوست کردن یک خربزه، یک سیبزمینی شیرین و یک کدو را نشان دادند.
کنترلر بازآرایی ارائه شده در این مطالعه یک کنترلر نابینا است که فقط به اطلاعات حسی پروپریوسپتیو متکی است. در حالی که توانایی بازآرایی موفق اشیاء سنگین و نگه داشتن آنها به طور محکم را نشان داده است، عملکرد آن میتواند با ترکیب بازخورد بصری و لمسی بهبود یابد.
"این مراحل اضافی چرخاندن کاری است که برای انسانها بسیار ساده است، ما حتی در مورد آن فکر نمیکنیم،" پولکیت آگراوال، استادیار بخش مهندسی برق و علوم کامپیوتر (EECS) در MIT، به نیوز ساینتیست گفت. "اما برای یک ربات، این کار چالش برانگیز است." سیستم موجود چند حالت خرابی دارد. اولاً، شیء میتواند از دست خارج شود زیرا کنترلر از هیچ اطلاعات دیداری استفاده نمیکند. ثانیاً، کنترلر ممکن است در صورت کوچک بودن سبزیجات شکست بخورد، زیرا انگشتان نمیتوانند بهطور مؤثر با شیء تماس پیدا کنند.



