
ربات پیشرفتهای که جراحی را مانند یک پزشک انسانی انجام میدهد پس از تماشای ویدیوها
یک ربات، که تنها از طریق مشاهده فیلمهای جراحان باتجربه آموزش دیده بود، توانست بهطور موفقیتآمیز عملیاتهای جراحی پیچیده را تکرار کند و با سطح مهارتی مشابه به پزشکان انسانی عمل کند.
محققان خاطرنشان میکنند که با استفاده موفقیتآمیز از یادگیری تقلیدی برای آموزش رباتهای جراحی، جراحی رباتیک به خودمختاری واقعی نزدیکتر میشود، جایی که رباتها ممکن است جراحیهای دشوار را بدون کمک انسانی انجام دهند.
به گفته تیم موسسه جانز هاپکینز، این رویکرد نیاز به برنامهریزی رباتها با هر مانور فردی مورد نیاز در طول یک عمل پزشکی را کاهش میدهد.
آکسل کریگر، استاد کمکی در دپارتمان مهندسی مکانیک جانز هاپکینز و نویسنده ارشد، بیان کرد: 'این واقعا جادویی است که ما این مدل را داریم و تنها ورودی آن را از دوربینها تامین میکنیم و میتواند حرکات رباتیکِ لازم برای جراحی را پیشبینی کند. ما معتقدیم که این یک گام مهم به سوی یک جبهه جدید در روباتیک پزشکی است.'
دقت یاریشده با هوش مصنوعی
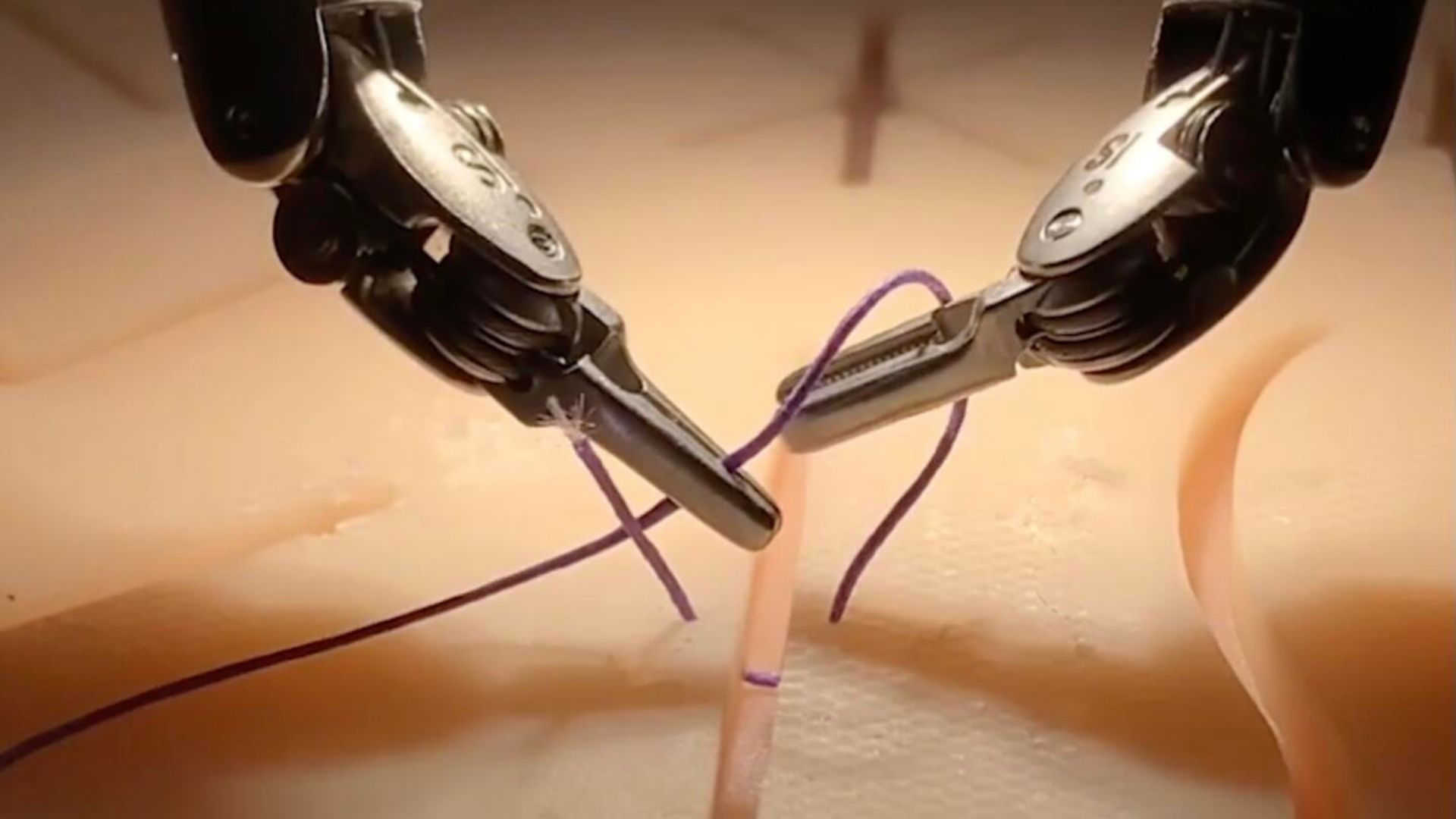
محققان دانشگاه استنفورد از یادگیری تقلیدی برای آموزش یک ربات سیستم جراحی داوینچی در سه وظیفه ضروری جراحی استفاده کردند: دستکاری سوزن، بالا بردن بافت، و بخیهزنی. این ربات با پیروی از مدل تیم، هر وظیفه را با مهارتی مشابه به جراحان انسانی انجام داد.
این مدل، معماری یادگیری ماشینی که چت جی پی تی را قدرت میبخشد با یادگیری تقلیدی ترکیب کرده است. با این حال، این مدل به 'زبان ربات' با استفاده از سینماتیک صحبت میکند، زبانی که زوایای حرکت رباتیک را به عبارات ریاضی تبدیل میکند، در حالی که چت جی پی تی از کلمات و متن استفاده میکند.
محققان صدها فیلم گرفته شده توسط دوربینهای مچ نصب شده بر روی بازوهای رباتهای داوینچی را در طول جراحی در مدل ادغام کردند. جراحان از سراسر جهان این ضبطها را ثبت میکنند که پس از استفاده برای تحلیل پس از عمل حفظ میشوند.
با بیش از ۵۰،۰۰۰ جراح آموزش دیده در سیستم و حدود ۷،۰۰۰ ربات داوینچی که در سراسر جهان در حال کار هستند، مقدار زیادی داده وجود دارد که رباتها میتوانند 'تقلید' کنند.
با وجود استفاده گسترده، دانشگاهیان ادعا میکنند که سیستم داوینچی به طور بدنامی ناسازگار است. با این حال، گروه توانست ورودی معیوب را عملکردی کند. آموزش مدل برای اجرای حرکات نسبی به جای اقدامات مطلق—که دقیق نیستند—بسیار حائز اهمیت بود.
جی وونگ 'براین' کیم، محقق پسادکترای دانشگاه جانز هاپکینز و نویسنده ارشد، در یک بیانیه گفت: 'تنها چیزی که نیاز داریم ورودی تصاویر است و سپس این سیستم هوش مصنوعی اقدام صحیح را پیدا میکند. ما متوجه شدهایم که حتی با چند صد نسخه نمایشی، مدل میتواند پروسه را بیاموزد و محیطهای جدیدی را که با آنها برخورد نکرده است، تعمیم بدهد.'
جراحی خودمختار
مدل نشاندهنده ظرفیت چشمگیر برای یادگیری مستقل است و وظایفی را که به طور صریح آموزش نداده شده بود، انجام میدهد، مانند برداشتن یک سوزن افتاده برای ادامه دادن یک پروسه بهطوری بیوقفه.
محققان اعلام کردند که این مدل میتواند به سرعت رباتها را برای انجام انواع مختلفی از جراحیها آموزش دهد، که فراتر از وظایف ساده به تکمیل فرایندها برود.
پیشتر، برنامهریزی رباتها برای حتی مراحل پایه جراحی نیازمند به دقت کدنویسی کردن هر اقدام، گاهی به سالها زمان نیاز داشت برای مدلسازی یک جنبه خاص مانند بخیهزنی برای یک نوع جراحی خاص.
تیم تاکید کرد که این روش بسیار محدودکننده بود. با این روش جدید، با این حال، تیم تنها نیاز دارد دادههای تقلیدی را از روشهای مختلف جمع کند، به آنها اجازه میدهد تا یک ربات را در چند روز آموزش دهند.
کریگر گفت: 'این به ما اجازه میدهد تا به هدف خودمختاری نزدیک شویم و در عین حال خطاهای پزشکی را کاهش دهیم و جراحیهای دقیقتری انجام دهیم.'



