
ربوگروسری: روبات نرم خودکار MIT مواد غذایی را با دقت بیسابقه بستهبندی میکند
تیمی از MIT یک روبات جدید طراحی کرده است که وظیفه بستهبندی اقلام در فروشگاههای مواد غذایی را خودکار میکند.
سیستم روباتیک نرم جدیدی که توسط پژوهشگران در آزمایشگاه علوم کامپیوتر و هوش مصنوعی موسسه (CSAIL) توسعه یافته است، شامل حسگرهای نرم لمسی، پروپریوسپشن مبتنی بر موتور، تکنولوژیهای دید پیشرفته، و الگوریتمی نوین است.
این سیستم به نام ربوگروسری میتواند جریان مداوم اشیاء تصادفی را که روی نوار نقاله حرکت میکنند، مدیریت کند.
به گفته پژوهشگران، بازوی روباتیک نرم آن از چند حسگر برای اندازهگیری اندازه و سختی یک شیء استفاده میکند. این امر به آن کمک میکند مفهوم مبهم «کانتینر خوب بستهبندی شده» را به اهداف واضح و قابل اندازهگیری تبدیل کند.
جزئیات پژوهش تیم در مجله IEEE Xplore منتشر شده است.
بستهبندی روباتیک پیشرفته
بستهبندی سطلهای روباتیک سنتی بر روی اقلام سخت و مستطیلی تمرکز داشته و اغلب با اشیاء با اشکال، اندازهها و سختیهای مختلف مشکل داشته است.
آنان ژنگ، دانشجوی دکترا در MIT CSAIL و نویسنده اصلی مطالعه، در بیانیهای که در The Robot Report منتشر شده، گفت: «چالش این است که تصمیمات فوری درباره بستهبندی یک آیتم بگیریم، به ویژه که فرضیاتی درباره شئ نویسون.
روباتیک ربوگروسری MIT این محدودیتها را با ترکیبی منحصر به فرد از دوربینهای RGB-D، موتورها با کنترل حلقه بسته و حسگرهای لمسی نرم برطرف میکند. دوربینهای RGB-D دادههای عمق و رنگ را ضبط میکنند و شناسایی دقیق اشکال و اندازههای اشیاء روی نوار نقاله را ممکن میسازند.
به گفته پژوهشگران، موتورها کنترل و بازخورد دقیقی ارائه میدهند و به گریپر اجازه میدهند به طور متناسب با خواص هر شئ تنظیم شود.
علاوه بر این، حسگرهای یکپارچه در گریپر فشار و تغییر شکل را اندازهگیری کرده و بینشهایی درباره سختی و شکنندگی یک شئ ارائه میدهند. این سیستم پیشرفته به ربوگروسری اجازه میدهد مجموعهای متنوع از اقلام را به طور مؤثر مدیریت کند.
دستهبندی دقیق اقلام
برای آزمایش کارایی ربوگروسری، پژوهشگران به طور تصادفی ده آیتم واقعی مواد غذایی را روی نوار نقاله قرار دادند و این فرآیند را سه بار تکرار کردند. آنها سیستم را با شمارش تعداد دفعاتی که اقلام سنگین بر روی اقلام حساستر قرار گرفتهاند، ارزیابی کردند.
MIT CSAIL گزارش داد که سیستم روباتیک نرم نسبت به روشهای سنتی عملکردی به مراتب بهتر نشان داد و نه برابر کمتر اقلام را آسیب زده و 4.5 برابر کمتر نسبت به روشهای مبتنی بر دید بدون حسگرهای لمسی عملکرد داشت.
در یک سناریو که انگورها و یک قوطی سوپ روی نوار نقاله قرار گرفتند، دوربین RGB-D آنها را شناسایی و اندازهگیری کرد. گریپر به نرمی انگورها را برداشت و حساس بودن آنها را حس کرد و آنها را در بافر قرار داد. سپس گریپر قوطی سوپ را برداشت، که به عنوان غیرحساس شناسایی شد، و آن را مستقیماً در صندوق بستهبندی کرد. در نهایت، انگورها به دقت روی آنها قرار گرفتند.
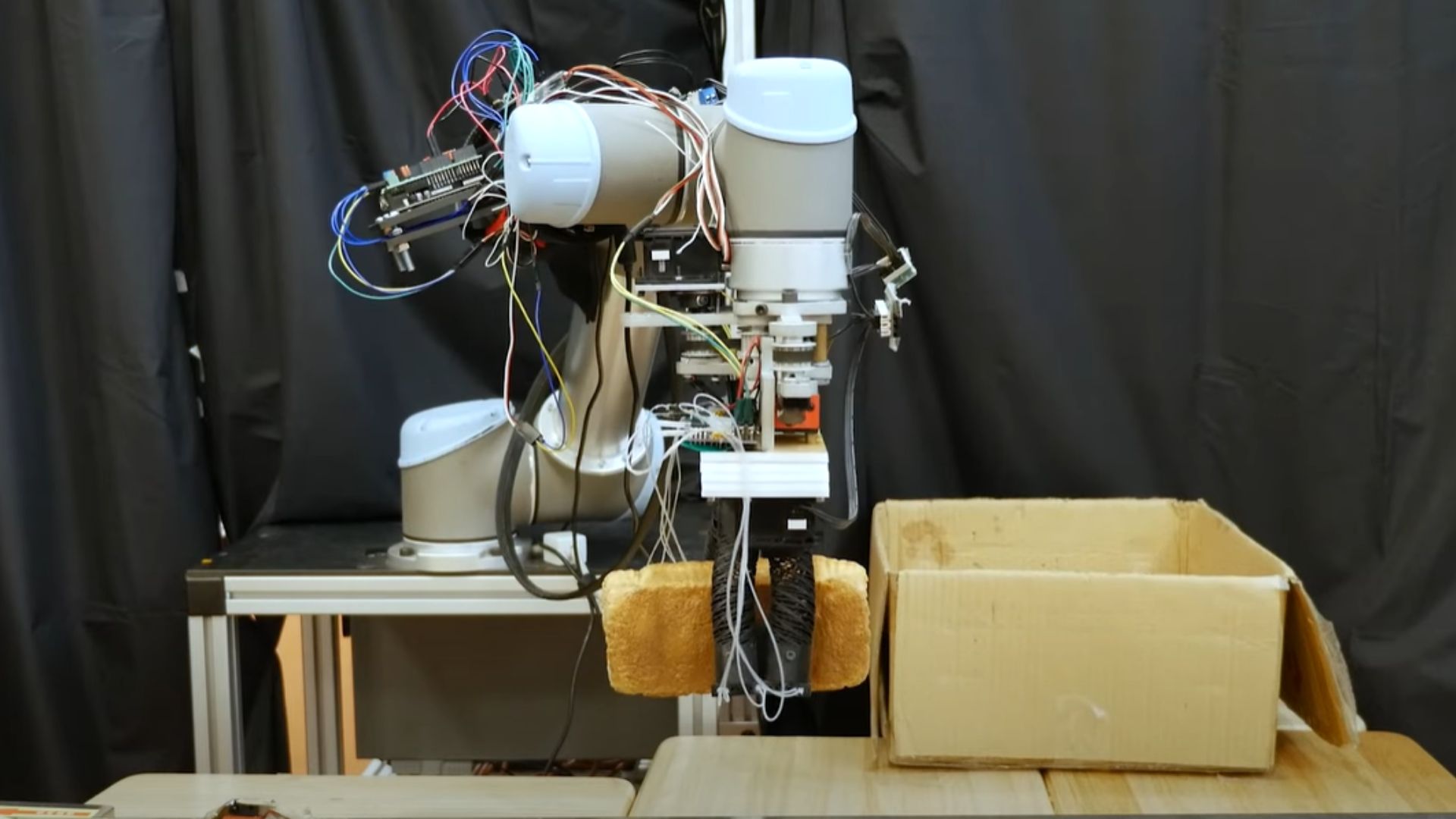
به گفته پژوهشگران، سیستم که به وسیله یک میکروپروسسور مدیریت میشود، عملکردی مقاوم با اقلام مختلفی از جمله نان، چیپس، قوطیهای سوپ و بستنیها نشان داد.
در حالی که سیستم موفق بوده است، هنوز جا برای بهبود وجود دارد. پژوهشگران ذکر کردهاند که روش فعلی برای تعیین حساس بودن یک شئ نسبتاً ابتدایی است.
ژنگ گفت: «در حال حاضر روشهای گرفتن ما بسیار ابتدایی هستند اما بهبود این تکنیکها میتواند مزایای زیادی داشته باشد. برای مثال، تعیین جهت بهینه گرفتن برای به حداقل رساندن تلاشهای ناموفق و کار با اقلامی که در جهتهای نامناسب قرار گرفتهاند،"
او توضیح داد: «یک جعبه غلات که به پهلو دراز کشیده است ممکن است برای گرفتن از بالا بیش از حد بزرگ باشد، اما اگر به صورت عمودی قرار گیرد، کاملاً قابل مدیریت خواهد بود."



