
روبات منحصربهفرد دانشجویان به تقلید انسانی در زمان واقعی و کنترل راه دور دست یافت
دانشجویان دانشگاهی در آفریقای جنوبی یک پلتفرم جدید تحقیقاتی روباتیک انساننما معرفی کردهاند که پیشرفتهایی در فناوری روباتیک را نشان میدهد.
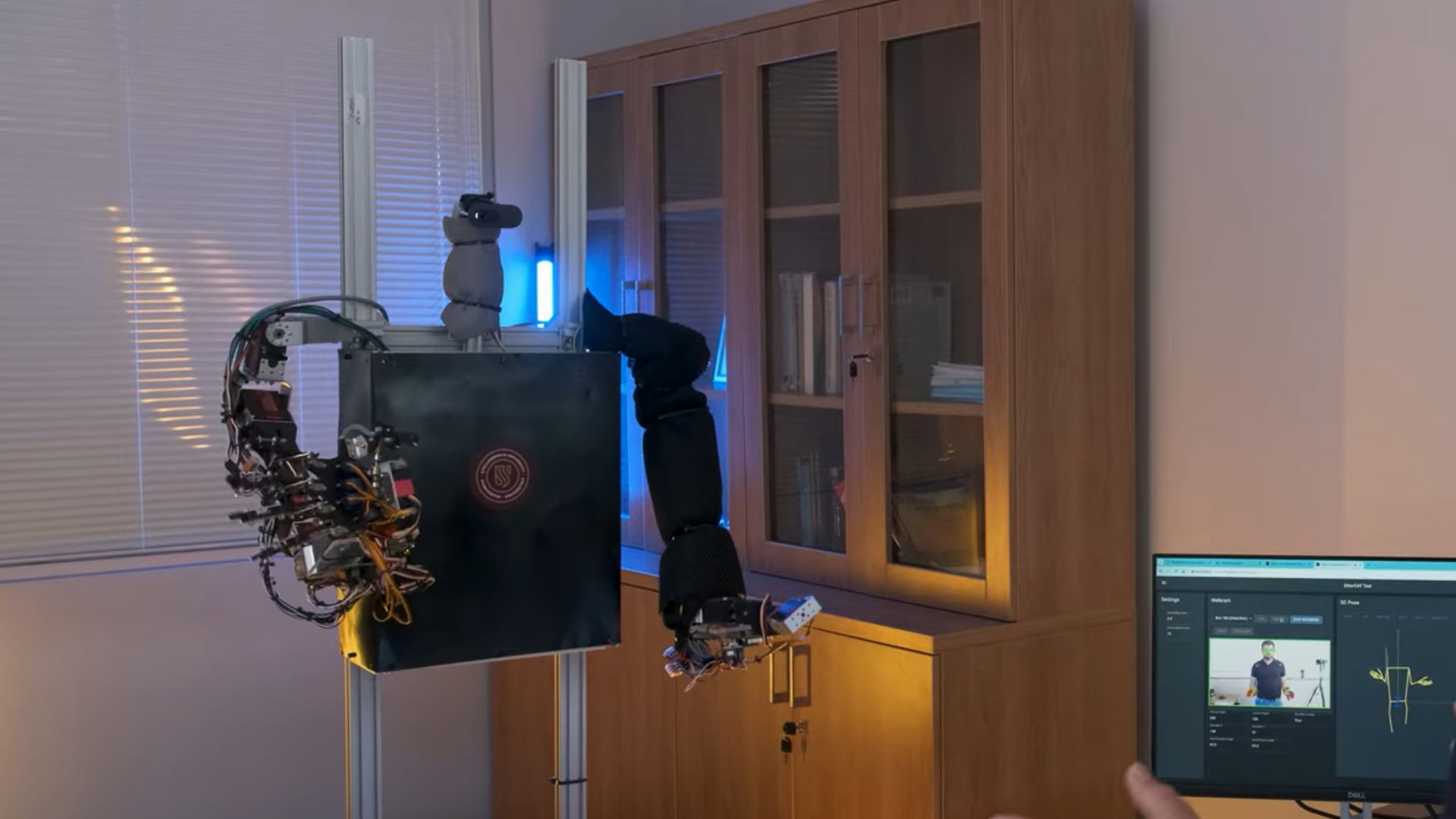
دپارتمان مهندسی برق و الکترونیک دانشگاه استلنبوش یک روبات انساننما با قاب کامل، تنه عملکردی، یک بازوی راست عملیاتی و یک بازوی چپ تقریباً تکمیل شده توسعه داده است.
این روبات با یک وبکم و نرمافزار پیشرفته تجهیز شده که میتواند حرکات انسانی را به صورت زمان واقعی دنبال و تقلید کند.
«سیستم ما کینماتیک معکوس را انجام میدهد که به آن اجازه میدهد حرکات انسانی را دنبال کند. این توانایی نظری کنترل از راه دور از هر جایی را به ما میدهد که پتانسیل برای عملیات از راه دور را نشان میدهد،» دکتر ویلیام داکیت، استاد دپارتمان مهندسی برق و الکترونیک SU، به یک رسانه خبری مهندسی گفت.
در فوریه، چهار عضو تیم روباتیک مدرسه پسرانه دیاسزان هنگکنگ کوچکترین روبات انساننما در جهان به ارتفاع فقط 141 میلیمتر — 11.3 میلیمتر کوچکتر از یک خودکار استاندارد را طراحی کردند و رکورد سال 2022 توسط زین احمد قریشی از پاکستان ثبت شده بود، شکستند.
روباتیک کنترلشده از راه دور
روبات انساننمای دانشگاه استلنبوش در حال حاضر در ارتفاع کامل با تنه عملیاتی، بازوی راست و دست کاملاً عملیاتی قرار دارد، در حالی که بازوی چپ آن تقریباً تکمیل شده است.
طراحی شده برای تعاملات انسانمانند پیشرفته، روبات شامل یک وبکم برای ردیابی دید است که با نرمافزار پیچیدهای که به آن امکان تحلیل و تقلید حرکات انسانی به صورت همزمان را میدهد، ترکیب شده است، به گزارش خبر مهندسی .
مجهز به سیستم کینماتیک معکوس، روبات قادر است حرکات یک اپراتور انسانی را به دقت تقلید کند که توانایی آن را برای تعامل با محیط خود به صورت پاسخگرانه و تطبیقی افزایش میدهد.
بر اساس تحقیقات، این ویژگی به روبات اجازه نمیدهد تنها حرکات پیچیده انسانی را دنبال کند بلکه امکان عملیات از راه دور را نیز فراهم میکند، زیرا پلتفرم به طور نظری قادر به کنترل از راه دور از هر مکانی در سراسر جهان است.
توسعه چنین فناوری بر قابلیت روباتهای انساننما برای استقرار در سناریوهای دوردست، چه برای تحقیق، بازرسی، یا وظایف همکارانه تأکید دارد.
طبق گفته محققان، دانشگاه استلنبوش نوآوریهایی را رهبری میکند که روباتیک انساننما را به کاربردهای عملی و دنیای واقعی نزدیکتر میکند با پیشرفت قابلیتهای ردیابی حرکات در زمان واقعی و عملیاتی کنترل از راه دور روبات.
نوآوریهای هدایتشده توسط دانشجویان
مرحله بعدی تحقیق در دپارتمان مهندسی برق و الکترونیک دانشگاه استلنبوش بر روی توسعه عملگرها برای پاهای روبات انساننما تمرکز دارد، با هدف دست یافتن به راه رفتن دوپایی. دستیابی به این قابلیت گام مهمی به سمت ایجاد یک روبات انساننما کاملاً متحرک با حرکات و تعامل واقعی است.
شناسایی رشد بالقوه رباتیک انساننما، دپارتمان بهطور فعال دانشجویان را در پروژههای نوآورانه درگیر میکند. چندین پروژه پایاننامهای کارشناسی بر تجربه عملی تأکید دارد، زیرا دانشجویان در طراحی عملگرهای سفارشی، دستهای رباتیک پیشرفته، و بازوهای انساننما با گریپهای پینشر کار میکنند.
این ابتکار هدف دارد نسل جدیدی از محققان را برای پیشرفت به مطالعات کارشناسی ارشد و ایجاد مشارکتهای عمیقتر در این زمینه الهام بخشد.
تیم اشاره میکند که یک دانشجوی کارشناسی ارشد نیز در حال پیشرفت تحقیقات از طریق شبیهسازیهای روباتیک مجازی با استفاده از پلتفرم انویدیا آیزاکسیسم است. این پروژه بر انتقال شبیه به واقعیت تمرکز دارد، تکنیکی که نتایج شبیهسازی را به نمونه اولیه
را اشاره میکند، با برنامههایی برای گسترش به کل پلتفرم انساننما.
ساخته شده با پروتکل ارتباطی EtherCAT، پلتفرم هر دو عملیات همزمان و غیرهمزمان را فراهم میکند. این معماری از انجام وظایف پیچیده پشتیبانی کرده و از فناوریهای قبلی که در سیستمهای کنترل شتابدهندههای ذرهای اعمال شدهاند بهره میبرد و اهداف دانشگاه و مهندسی دپارتمان را گستردهتر میکند.


