
زندگی در سهبعد: ربات ۱ میلیمتری که با یک جرقه قدرت به حرکت درمیآید
محققان دانشگاه کرنل ربات کوچکی به اندازه کمتر از ۱ میلیمتر طراحی کردهاند که از حالت مسطح یک ششضلعی به شکلهای سهبعدی تبدیل میشود و با دریافت یک بار الکتریکی حرکت میکند.
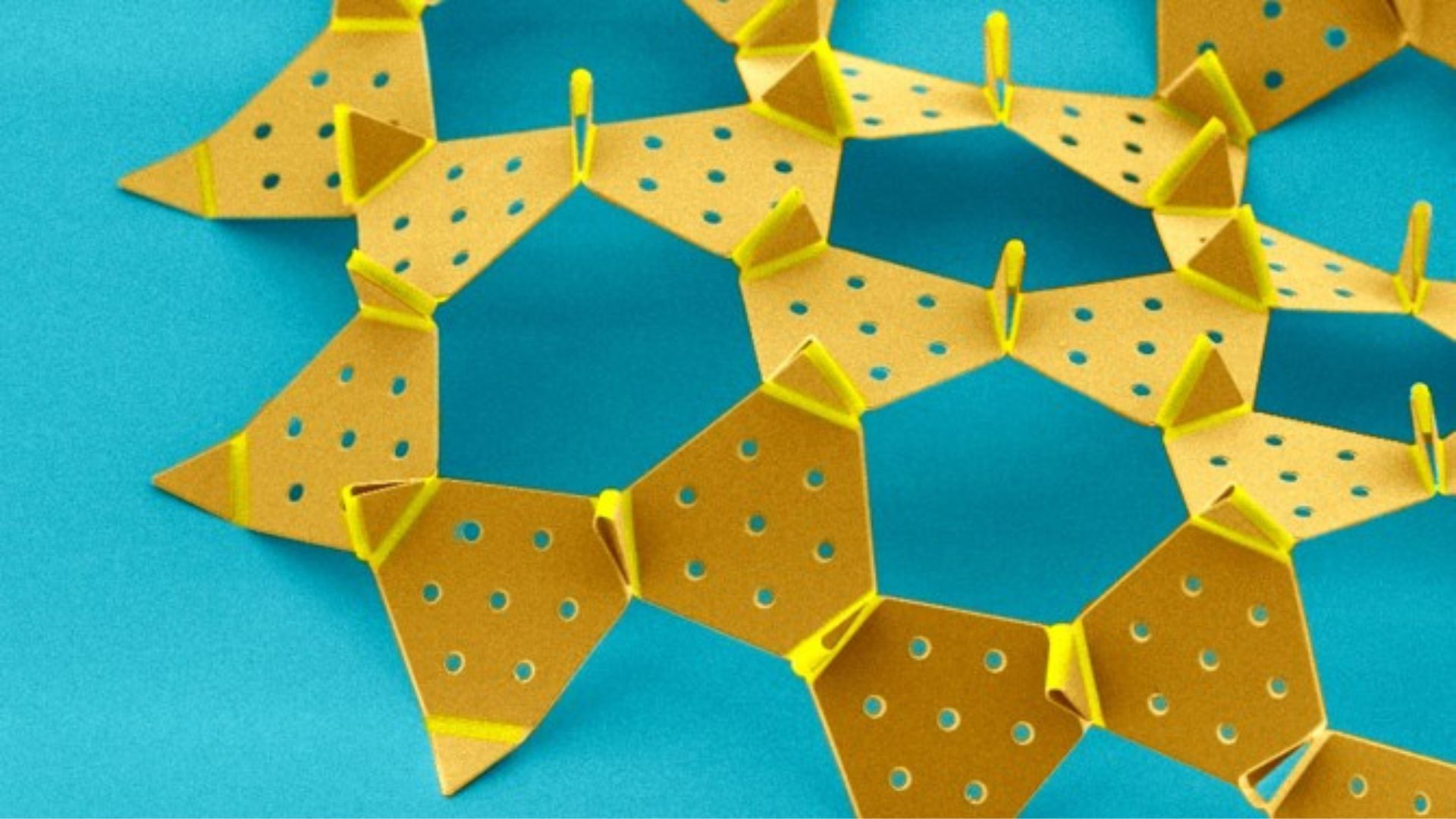
انعطافپذیری این ربات از طراحی منحصر به فرد آن با استفاده از تکنیک کیریگامی (مشابه اوریگامی) که با برشهایی در ماده امکان تا شدن، گسترش و حرکت را فراهم میکند، ناشی میشود.
طراحی کیریگامی به آن کمک میکند از لولاهای بسیار کوچک ۱۰ نانومتری تا پانلهای ۱۰۰ میکرومتری کشیده شود و رباتی به اندازه حدود ۱ میلیمتر تشکیل دهد. این پانلها در سلولهایی قرار دارند که میتوانند در ۱۰۰ میلیثانیه ۴۰ درصد گسترش یا انقباض داشته باشند.
تیم تحقیقاتی در چکیده مطالعه اظهار کردند: «با غلبه بر موانع مرتبط با کوچکسازی، ما رباتهای میکروسکوپی الکترونیکی قابل پیکربندی متاشیت را به نمایش میگذاریم».
ربات تغییر شکلدهنده
ربات کیریگامی از موجودات زنده که میتوانند شکل خود را تغییر دهند الهام گرفته شده است. رباتهای سنتی میتوانند اعضای خود را حرکت دهند اما به طور کلی شکل ثابتی دارند.
این ربات متاشیت جدید از متامواد ساخته شده است که شامل تعداد زیادی بلوکهای ساختمانی است که به ماده خواص مکانیکی منحصر به فردی که غالباً در مواد طبیعی یافت نمیشود، میبخشد.
ربات از کاشیهای ششضلعی با حدود ۱۰۰ پانل دیاکسید سیلیکون ساخته شده و این پانلها توسط بیش از ۲۰۰ لولای بسیار نازک به هم متصل شدهاند. این پانلها در سلولهایی قرار دارند که میتوانند در ۱۰۰ میلیثانیه ۴۰ درصد گسترش یا انقباض یابند.

با بیش از ۲۰۰ لولا، ربات میتواند بین اشکال مختلف تغییر کند. با کنترل مناطق جداگانه با زمانبندی دقیق، ربات حرکتهایی برای خزیدن یا تغییر شکل خود ایجاد میکند.
هنگامی که به صورت الکترو شیمیایی فعال میشود، این لولاها تا میشوند که به ربات امکان گسترش، انقباض و تغییر شکل را میدهند. حتی میتواند به دور اشیاء بپیچد و به فرم مسطح خود بازگردد.
ایتی کوهن، استاد فیزیک در دانشکده هنرها و علوم، در بیانیهای گفت: «در اوریگامی، اگر بخواهید شکلهای سهبعدی بسازید، معمولاً باید ماده اضافی را در داخل جسم سهبعدی که میسازید پنهان کنید. اما با کیریگامی، نیازی به پنهان کردن هیچچیزی نیست».
پیشرفت بزرگ در ربات کوچک
ساخت این ماشین میکروسکوپی فرآیندی طولانی و پیچیده بود که شامل کارهایی مانند عبور دادن سیمهای الکتریکی از لولاهای مختلف و یافتن تعادل کامل بین انعطافپذیری و سختی برای امکانپذیر کردن و حفظ شکل ربات بود.
بر اساس تیم تحقیقاتی، یکی از بزرگترین چالشها توسعه راهی بود که دستگاهی با این همه بخشهای متحرک بتواند به صورت مستقل حرکت کند. جیسون کیم، پژوهشگر پسادکترا و همنویسنده این مطالعه گفت: «وقتی شما یک شیت کیریگامی دارید، صدها نقطه تماس بالقوه با زمین دارید. و بنابراین مدت زیادی بود که متوجه نمیشدیم کدام بخشهای ربات با زمین تماس دارند تا ربات را حرکت دهند».
کشف شد که به جای اینکه به اصطکاک تکیه کند، ربات میتواند با تغییر شکل محیط خود بیشتر به طور مداوم حرکت کند. البته، شنا در مقیاس میکروسکوپی بسیار متفاوت از شنا معمولی است و به حرکت در مایع ضخیمی مانند عسل شباهت دارد.
با تنظیم شکل ربات به گونهای که بخشهای مختلف در نقاط مختلف حرکت نزدیکتر به سطح باشند، نیروهای کششی مایع برای جابجایی ربات به جلو استفاده شود. این امر جنبه منحصربهفرد طراحی رباتهای میکروسکوپی را برجسته میکند زیرا فیزیک حرکت در این مقیاس به شدت با رباتهای بزرگتر و ماکروسکوپی تفاوت دارد.
مرحله بعدی تکنولوژی متاشیت شامل ترکیب سازههای مکانیکی انعطافپذیر با کنترلرهای الکترونیکی است تا مواد «الاسترونیک» فوقالعاده پاسخگو با ویژگیهایی که در طبیعت یافت نمیشود، ایجاد شود.
محققان به کاربردهای پتانسیل اشاره میکنند که شامل میکرو ماشینهای قابل پیکربندی، دستگاههای زیستپزشکی مینیاتوری و موادی که توانایی پاسخ به ضربهها تقریباً با سرعت نور را دارند، نه صدا.
با ادغام الکترونیکهایی که از نور انرژی میگیرند، این مواد میتوانند برنامهریزی شوند تا به تحریکهای مختلف واکنش نشان دهند. به جای تغییر شکل زمانی که لمس میشوند، میتوانند «فرار» کنند یا با نیروی بیشتری نسبت به نیروی دریافتی عقبنشینی کنند، که امکانپذیرهای جدیدی برای مواد پیشرفته پاسخگو فراهم میکند.
کوهن گفت: «ما فکر میکنیم که این متامواد فعال –این مواد الاسترونیک– میتوانند پایهای برای نوع جدیدی از ماده هوشمند باشند که توسط اصول فیزیکی که فراتر از آن چیزی است که در دنیای طبیعی ممکن است، هدایت میشود».
جزئیات تحقیقات تیم در مجله Nature Materials منتشر شده است.



