
محققان بازوهای ربات ۱۲۰ دلاری را با GPT-4o در چهار روز آموزش دادند تا نشتها را تمیز کنند
در یک نمایش قابل توجه از نوآوری منبع باز، تیمی یک ربات تمیزکننده ارزان برای انجام یک سری از اقدامات توسعه داده است.
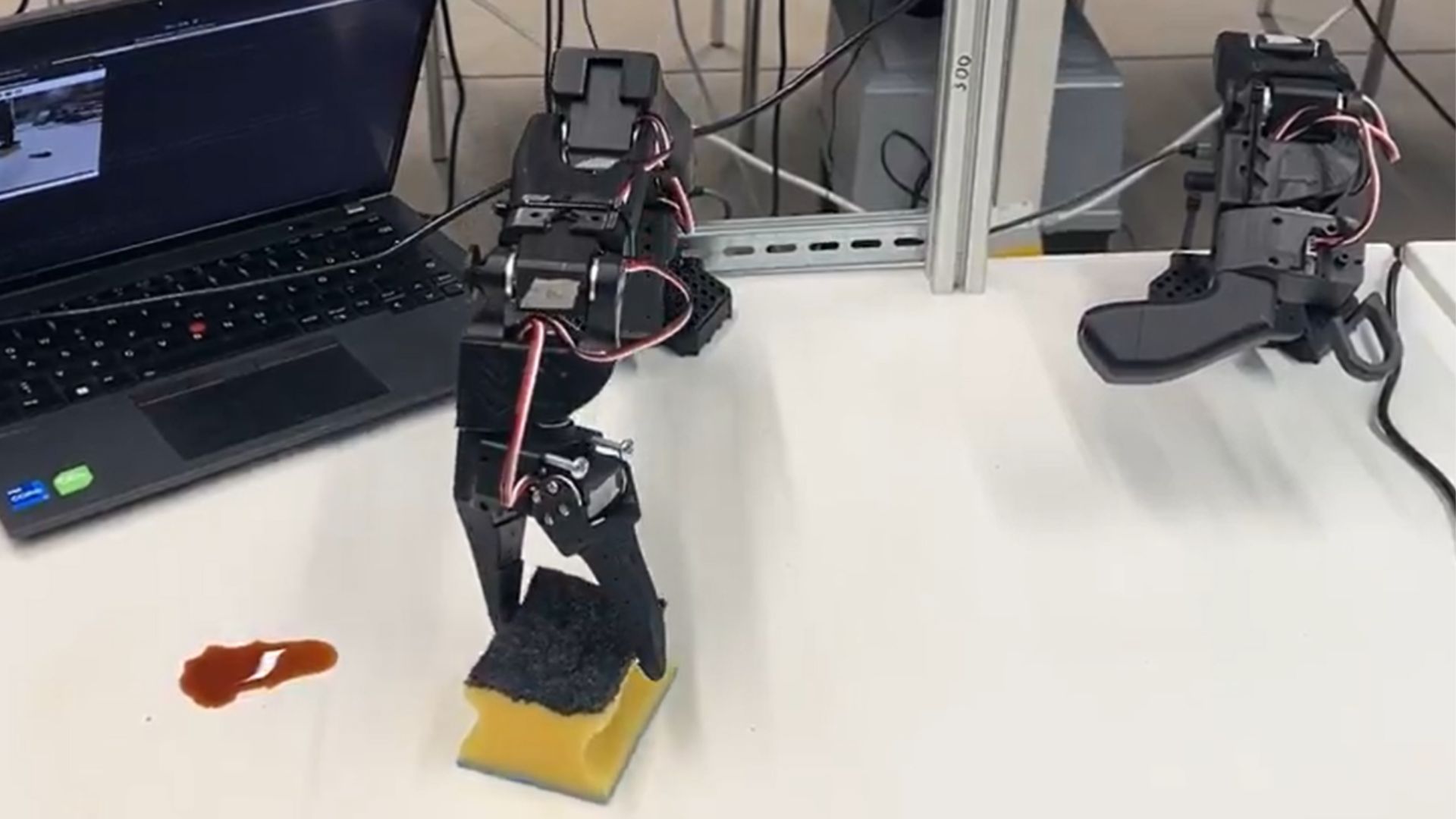
یک جفت متخصص ربات در دانشگاه برکلی و ETH زوریخ به طور موفقیتآمیز دو بازوی ربات ۱۲۰ دلاری را آموزش دادند تا نشتها را تمیز کنند.
تنها در چهار روز، آنها رباتها را با استفاده از GPT-4o برنامهریزی کردند و یک مدل زبان بصری برای تعامل مؤثر انسان و ربات (HRI) ایجاد کردند.
آموزش آنها شامل تقریباً ۱۰۰ نمایش برای بهبود حرکات رباتها بود و پتانسیل فناوری دسترسیپذیر در خودکارسازی وظایف روزمره را نشان داد.
ربات تمیزکننده نوآورانه
پروژه نوآورانه یانیک گروتوسن و کاسپار جانسن قابلیت بازوهای ربات SO-100 توسعهیافته توسط The Robot Studio را نمایش میدهد که بهطور خاص برای وظایفی مانند تمیز کردن نشتها طراحی شدهاند.
این بازوهای ربات توسط یک عامل چندوجهی پیچیده که با استفاده از AI LangChain تنظیمشده کنترل میشوند، که ارتباط و هماهنگی بیوقفه بین رباتها و محیط آنها را ممکن میسازد.
ادغام این فناوری، تعامل بهبودیافته انسان و ربات را ممکن میسازد، و تعامل با رباتها در حین عملیات آنها را برای کاربران آسانتر میکند.
برای بهبود حرکات بازوهای ربات، تیم سیاستهای حرکتی را بر اساس پیادهسازی پیشرفته ACT (آموزش Actor-Critic) LeRobot به کار گرفتند. این رویکرد اطمینان میدهد که رباتها از الگوهای حرکتی مؤثر بهوسیله یادگیری تقویتی یاد میگیرند، و به آنها اجازه میدهد برای انطباق و بهبود در گذر زمان.
هر سیاست حرکتی با حدود ۱۰۰ نمایش آموزش داده شد، که به رباتها یک مجموعه داده قوی برای یادگیری فراهم کرد. این روش آموزشی نه تنها کارآیی رباتها در انجام وظایف مختلف را بهبود میبخشد بلکه به توانایی آنها در یادگیری از اقدامات انسانی نیز کمک میکند و به تعاملات شهودیتر منجر میشود.
این پروژه نشاندهنده دسترسیپذیری و پتانسیل رو به رشد رباتیک است، که چگونگی افزایش منابع منبع باز و پلتفرمهای مشترک برای توانمند کردن نوآوران در ایجاد راهحلهای پیشرفته خودکارسازی را نشان میدهد.
بازوی مونتاژ آسان
اگر به دنبال یک ربات ارزانقیمت برای پروژههای مشابه DIY در خانه هستید، The Robot Studio برنامههایی را در یوتیوب برای ساخت بازوهای ربات به اشتراک گذاشته است.
SO-100 آنها که در اینجا استفاده میشود، یک بازوی ربات چاپ سه بعدی منبع باز است که با توجه به اقتصادی و سهولت مونتاژ طراحی شده است. این سیستم تنها به شش سروو، یک برد آداپتور و قطعات چاپ سه بعدی نیاز دارد. تمام فایلهای لازم در GitHub Robot Studio در دسترس هستند، که هزینه هر واحد آن با خرید عمده کمتر از ۱۰۰ دلار است.
قطعات این بازو، چاپشده با استفاده از ماده فیبر کربن مقاوم، برای استحکام و جداشدگی آسان بهینه شدهاند. با تنظیم تنظیمات قابل تنظیم و طراحی پالایشیافته فک، این پروژه هدف دارد تا پشتیبانی از سفارشیسازی مداوم و کاربرپسندی را فراهم کند.
فرایند مونتاژ نیازمند قرار دادن حمایت سروو در زاویه 45° برای عملکرد بهینه است. هر سروو یک شماره شناسایی منحصربهفرد دریافت میکند، که از طریق یک برد آداپتور متصل به برق برنامهریزی شده است. سرووها به زنجیره متصل شده و به ترتیب شناسایی میشوند.
پیچها برای پایدارسازی با شاخکهای سروو به صورت عمودی یا افقی قرار میگیرند. استفاده از پیچگوشتی مغناطیسی برای سهولت، گام اولیه در مونتاژ بازو چرخش گام است. برای فراهم کردن چرخش بیمورد و یک پایان عملکردی صاف، پیچها بهطور محکم با انگشت تنظیم میشوند برای حرکت متوازن.
یک بازوی رباتیک مبتنی بر سروو ساده اما دقیق برای مونتاژ است. سیمها باید بدون گره باشند و نقاط پنجم دور از خطر چرخش قبل از قرارگیری و محکم شدن قطعات مهم، مانند سرووها و قرقرههای فعال، قرار گیرند. پیچهای محکم بهطور انگشتی برای نصب هر سروو استفاده میشود، اطمینان میدهد که اتصالها محکم هستند بدون اینکه بیش از حد سفت شوند.
پیچگوشتیهای مغناطیسی و همترازی دقیق تناسبی صاف را حفظ میکنند. چرخش و پیچ و مهرهی مچ از جمله نقاط مهم قرار گرفته برای بهترین حرکت ممکن هستند. تغییرات لحظه آخری، مانند تغییر فایلهای منطق سیگنال موقتی (STL)، کارایی و طول عمر طراحی را بهبود میبخشند. تنها در 30 دقیقه، نتیجه نهایی یک بازوی قوی و سریع است.



