
هندکراولر: دست روباتیک جداشونده مانند «اویل دد» که میخزد، میگیرد و دامنه دسترسی را گسترش میدهد
پژوهشگران موسسه فدرال تکنولوژی لوزان سوئیس (EPFL) دستی رباتیک توسعه دادهاند که میتواند از بازوی خود جدا شود و مانند یک عنکبوت بخزد تا اشیاء دور از دسترس را بیابد.
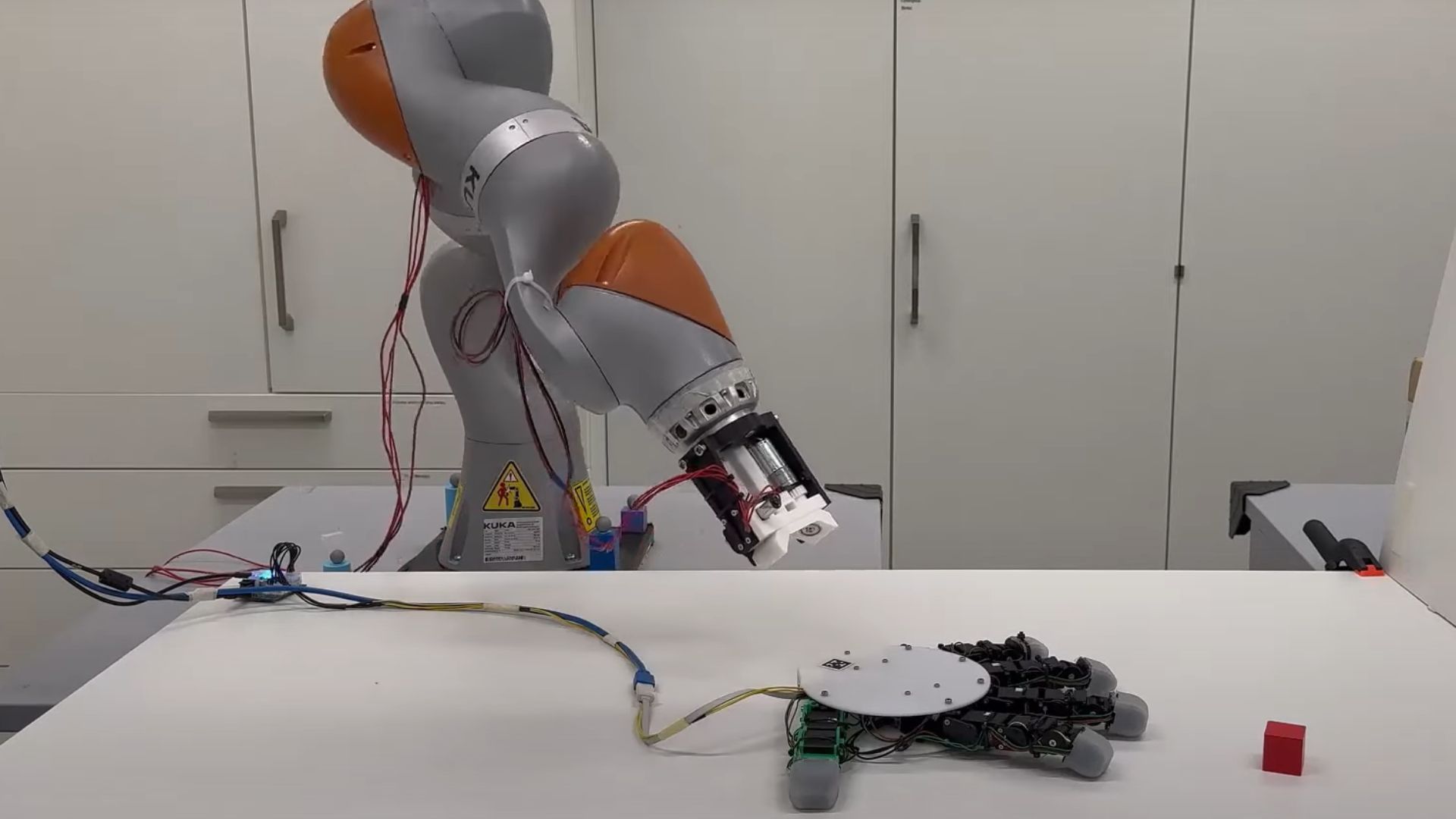
این دست رباتیک که به نام «هندکراولر» شناخته میشود، میتواند به راحتی از بازوی خود جدا شود، روی سطوح بخزد، اشیاء را بگیرد و سپس دوباره به بازو متصل شود. اگر شیئی از دسترس بازو دور باشد، دست میتواند با استفاده از ترکیبی از آهنرباها و یک پیچ قفلکننده جدا شود، خزیده و شئ را بیابد و سپس دوباره به بازو متصل شود.
این طراحی در چهلمین کنفرانس بینالمللی رباتیک و اتوماسیون IEEE در روتردام، هلند به نمایش درآمد.
دست روباتیک چندکاربردی
دستهای روباتیک و روباتهای خزنده شباهتهای بنیادیای دارند، مثل داشتن بدنه اصلی با بخشهایی که وظایف مختلف را انجام میدهند. اما بیشتر دستهای روباتیک عمدتا برای گرفتن طراحی شدهاند، در حالی که روباتهای خزنده بر تحرک تمرکز دارند.
تا به امروز، هیچ دست روباتیکی به طور خاص برای انطباق با هر دو کار گرفتن و خزیدن همزمان طراحی نشده است. از آنجایی که هر دو عملکرد مهم هستند، تکیه تنها بر طراحی متمرکز بر گرفتن ممکن است ایدهآل نباشد.
طراحی یک دست روباتیک که هم بتواند راه برود و هم بگیرد، کار سادهای نیست و نمیتوان آن را به راحتی تهیه کرد. برای توسعه این دستگاه نوآورانه، پژوهشگران از الگوریتم ژنتیک برای پیدا کردن بهترین طراحی استفاده کردهاند.
این الگوریتم پیکربندیهای مختلف را تست کرد، تمرکز بر تعداد و محل قرارگیری انگشتان در یک محیط شبیهسازی شده. طبق گفته IEEE Spectrum، بهترین طراحی، دست پنجانگشتی بود، با دو انگشت اختصاص دادهشده برای گرفتن اجسام هنگام جدا شدن، در حالی که سه انگشت دیگر برای خزیدن بهینهسازی شده بودند.
طبق گفته پژوهشگران، هر انگشت چهار درجه آزادی دارد که به آنها اجازه میدهد در هر دو جهت خم شوند. این طراحی به دست امکان میدهد که اشیاء را بدون ایجاد مانع در حرکت خود بلند کند و آن را برای وظایفی که هم به تحرک و هم به دقت نیاز دارند، بسیار مناسب میکند.
تیم ادعا میکند که این رویکرد به دست روباتیک اجازه میدهد هر دو کار را به طور مؤثر انجام دهد و یک راهحل چندکاره ارائه دهد که فاصله بین تواناییهای گرفتن و خزیدن در روباتیک را پر میکند.
دست خودکار برای گرفتن
طراحی منحصر به فرد هندکراولر به انگشتانش اجازه میدهد که هم به جلو و هم به عقب خم شوند و به طور مؤثری توانایی گرفتن اشیاء را در راههای مختلف دوبرابر میکند. این قابلیتپذیری، توانایی گرفتن آن را نسبت به دستهای روباتیک سنتی افزایش میدهد.
هندکراولر با استفاده از آهنربا برای تراز کردن و یک مکانیزم پیچی که آن را محکم قفل میکند، به < مچ روبات متصل میشود. با اینکه سیستم در ویدیو به صورت دستی کنترل میشود، پژوهشگران اشاره میکنند که یک نسخه خودکار در آزمایشگاه عملیاتی شده است.
به گفته پژوهشگران، سیستم خودکار از مکانیابی خارجی استفاده میکند و میتواند کل ترتیب گرفتن را بدون دخالت انسانی اجرا کند.
تیم تأکید میکند که این رویکرد نوآورانه اجازه میدهد تا سیستمهای روباتیک انعطافپذیرتر و تطبیقپذیرتری به وجود آید، و به روبات اجازه میدهد که اشیائی را که معمولاً غیرقابل دسترس هستند، بگیرد و بازیابی کند.
تأثیرات دستان روباتیک جداشونده و خودکار که مستقل حرکت میکنند هنوز مشخص نیست. در حالی که ممکن است انعطافپذیری و کارایی را افزایش دهند، نگرانیهایی درباره ایمنی و کنترل در محیطهای مختلف نیز بوجود میآیند.



