پریدن به سوی آینده: توسعه پای مصنوعی با الهام از عضلات انسانی توسط دانشمندان

هفتاد سال پیش هنگامی که مخترع آمریکایی جورج دوال با معرفی یونیمیت، اولین ربات دیجیتالی و قابل برنامهریزی، جهان را هیجانزده کرد، این رویداد نقطه عطفی در زمینه اتوماسیون و ماشینهای هوشمند بود. اختراع دوال نه تنها زمینه را برای صنعت رباتیک مدرن فراهم کرد بلکه راه را برای فناوریهای هوشمند در سراسر جهان هموار نمود.
از آن زمان، دانشمندان پیشرفتهای بزرگی در این حوزه داشتهاند و حتی ربات انساننمای پیشرفتهای طراحی کردهاند که میتواند با مردم در تعامل باشد و رفتارهای اجتماعی را تقلید کند. در حالی که سوفیا که توسط هانسون رباتیک ساخته شده، در همه ابعاد پیشرفته است، او یک ویژگی مشترک با پیشینیان خود در سال ۱۹۵۴ یعنی یونیمیت دارد. هر دو برای حرکت به موتورها متکی هستند، همانطور که هر ماشین رباتیکی دیگری طراحی شده است.
اگر رباتها قرار است بیش از پیش شبیه به انسان شوند، باید مانند انسانها راه بروند و حرکت کنند، امری که با فناوری موتور مکانیکی ۲۰۰ ساله ممکن نیست. با این حال، یک اختراع جدید توسط تیمی از دانشمندان در انستیتو مکس پلانک برای سیستمهای هوشمند (MPI-IS) در آلمان و ETH زوریخ در سوئیس که پا رباتیک با نیروی عضلانی ساختهاند، ممکن است پاسخ این چالش باشد.

منبع: توماس بوخنر / ETH زوریخ و توشیهیکو فوکوشیما / MPI-IS
این پروتوتایپ که در مقالهای منتشر شده در مجله Nature ارائه شده، نه تنها به طور خودکار به زمینهای ناهموار انطباق مییابد، بلکه موانع را بدون نیاز به سنسورهای پیچیده تشخیص داده و واکنش نشان میدهد.
چگونه کار میکند؟
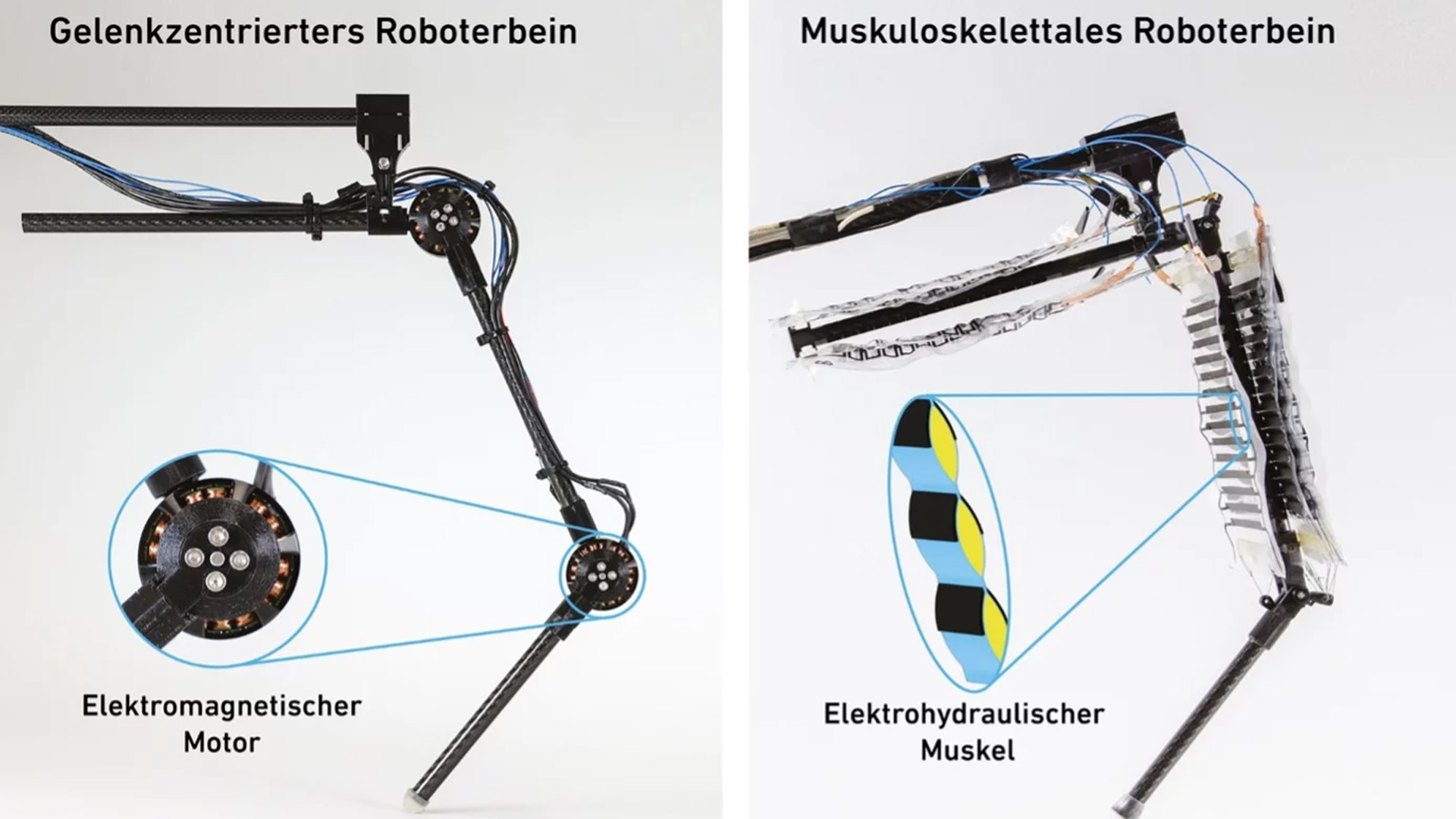
با الهام از ۶۰۰ عضله بدن انسان، مرکز یادگیری سیستمهای مکس پلانک ETH (CLS) که یک مرکز تحقیقاتی مشترک بین جامعه مکس پلانک و ETH زوریخ است، یک عضله باز کننده و یک عضله خم کننده در سیستم یکپارچه کردهاند تا آن را قادر به حرکت در هر دو جهت کند. این مکانیزمها، که به عنوان HASELs شناخته میشوند، توسط تاندونها به اسکلت رباتیک متصل شدهاند.
در مصاحبهای با Interesting Engineering ، توشیهیکو فوکوشیما از MPI-IS و توماس بوخنر از ETH، دانشجویان دکترا و نویسندگان مطالعه، تاکید کردند که این مکانیزمها، علیرغم ابداع در سال ۲۰۱۸، نتایج امیدوار کنندهای در رباتیک نرم نشان میدهند.
“انگیزه این تحقیق از مشاهده محدودیتهای سیستمهای رباتیک متداول که توسط موتورهای الکتریکی سنتی نیرو میگیرند، نشأت گرفت،” فوکوشیما به IE گفت، “من تحت تأثیر انطباق پذیری و کارایی سیستمهای عضلات طبیعی قرار گرفتم و میخواستم بررسی کنم که چگونه عضلات مصنوعی میتوانند این ویژگیها را در رباتها تقلید کنند.”

بوخنر اشاره دارد که مکانیزمها از کیسههای نازک پلاستیکی ساخته شدهاند که شبیه به آنهایی هستند که برای ساختن یخ مکعبی استفاده میشوند. اینها با روغنی غیر رسانا پر شده و به صورت جزئی با الکترودهایی که بارهای الکتریکی مخالفی دارند پوشش داده شدهاند. برای کنترل انقباضات و انبساطات مکانیزمها، محققان از یک کد کامپیوتری استفاده میکنند که با تقویتکنندههای ولتاژ بالا تعامل دارد.
“زمانی که ولتاژی اعمال میشود، جذب الکترواستاتیکی بین الکترودها باعث میشود که کیسه منقبض شده و روغن به یک طرف رانده شود، که منجر به انقباض عضلانی و ضخیمشدگی میشود،” بوخنر اظهار داشت. “پا از جفت عضلات مصنوعی - باز کنندهها و خم کنندهها - استفاده میکند که به یک ساختار اسکلتی از طریق تاندونها متصل شده است.”
به روشی مشابه حرکت کمک شده توسط عضلات بایسپس و تریسپس در انسانها، این آرایش به مفصل اجازه میدهد تا در هر دو جهت خم و باز شود. “سفتی عضلات میتواند با تغییر ولتاژ اعمالی تنظیم شود، که به پا اجازه میدهد به انواع مختلف زمین انطباق یابد و به طور طبیعی ضربات را جذب کند،” فوکوشیما اضافه کرد.
فراتر از موتورهای الکتریکی
دو دانشجوی دکترا کارایی پای رباتیک را با بررسی میزان انرژی هدر رفته به صورت گرما ارزیابی کردند. “تصویربرداری مادون قرمز برای مقایسه کارایی انرژی استفاده شد، نشان میدهد که پای با نیروی عضله مصنوعی حرارت کمتری نسبت به پای موتوری تولید میکرد،” فوکوشیما گفت.
به گفته بوخنر، یک پای موتوری به انرژی زیادی برای حفظ وضعیت خمیده نیاز دارد. در مقابل، پای الکتروهیدرولیک دما را ثابت نگه میدارد، زیرا عضله مصنوعی الکترواستاتیک است. “برای حفظ یک وضعیت به انرژی کمی نیاز دارد به دلیل عملکرد الکترواستاتیکی آن، و بطور معنیداری مصرف برق و تولید حرارت را کاهش میدهد،” او افزود.
“معمولاً، رباتهای موتوری الکتریکی نیاز به مدیریت حرارتی دارند که نیازمند هیتسینک یا فنهای اضافی برای از بین بردن حرارت در هوا میباشند،” فوکوشیما اضافه کرد. “سیستم ما به آنها نیازی ندارد.”
حرکت در زمینهای ناهموار
توانایی پرش پای رباتیک به دلیل توانایی آن در بلند کردن انفجاری وزن خود آن است. برای ارزیابی نحوه برخورد آن با زمینهای ناهموار، تیم تحقیق چندین آزمون شبیهسازی شرایط مختلف سطح و موانع را انجام دادند. “پا توانایی حفظ پایداری و تنظیم زاویههای مفصلی خود را بدون سنسورها یا ورودیهای کنترلی اضافی نشان داد،” بوخنر گفت.
ارزیابیها بعلاوه نشان دادند که آن به خوبی به سطوح مختلف انطباق مییابد، یک ویژگی که در رباتیک نرم از اهمیت بالایی برخوردار است. “هدف ما ایجاد سیستمی بود که قادر به انطباق با زمینهای ناهموار و انجام حرکات سریع بدون تکیه بر سنسورها و مکانیزمهای کنترلی پیچیده باشد،” بوخنر مشاهده کرد.
“عضلات مصنوعی پای رباتیک میتوانند سفتی خود را با تغییر ولتاژ اعمالی تنظیم کنند، که به پا اجازه میدهد به شکلی پویا به تغییرات زمین واکنش دهد،” او افزود. “وقتی پا با یک سطح ناهموار مواجه میشود یا از پرش فرود میآید، انعطافپذیری عضلات به آن اجازه میدهد ضربات را جذب کند و زاویههای مفصلی را به طور طبیعی تنظیم کند.”
به گفته دکتر رابرت کاتسچمن ، استادیار ETH زوریخ و سرپرست پروژه، این رفتار شبیه به سفت شدن و یا آرامش عضلات انسان در پاسخ به سطوح مختلف است. “این تفاوتی با موجودات زنده ندارد،” او میگوید. “اگر نتوانیم زانوهایمان را خم کنید، به عنوان مثال، راه رفتن روی سطح ناه
موا ممکن است بسیار دشوار باشد، فقط به قدم برداشتن از پیادهرو بر روی جاده فکر کنید.”
عضله مصنوعی با تعامل با محیط خود به یک موقعیت بهینه تنظیم میشود. این با دو سیگنال ورودی هدایت میشود - یکی برای خم و دیگری برای باز کردن مفصل. “انطباق با زمین یک جنبه کلیدی است، فوکوشیما میگوید. “هنگامی که یک فرد بعد از پریدن به هوا به زمین میرسد، نیازی به فکر کردن از قبل درباره اینکه آیا باید زانوهایشان را در زاویه ین درجه یا زاویه ۷۰ درجه خم کنند، ندارند.”
پتانسیل آینده
علیرغم چالشهایی مانند محدودیتهای مواد و قابلیت اعتماد در توسعه پروتوتایپ، محققان درباره پتانسیل پای رباتیک برای کاربردهای دنیای واقعی خوشبین هستند. آنها معتقدند که این تکنولوژی میتواند در حوزههایی مانند پزشکی، کشاورزی، و دینامیک اجتماعی از طریق تعامل انسان با ربات تحول ایجاد کند.
“در حوزه بهداشت و درمان، رباتهای با نیروی عضله مصنوعی میتوانند به پروتزهای طبیعیتر و اسکلتهای خارجی منجر شوند، که حرکت را برای افراد دارای معلولیت بهبود میبخشند،” فوکوشیما میگوید. “در امدادرسانی به بلایای طبیعی، چنین رباتهای میتوانند به طور موثرتری در محیطهای چالشبرانگیز حرکت کنند و به مناطقی دسترسی پیدا کنند که برای انسانها خطرناک یا غیرقابل دسترسی است.”
“توانایی آنها برای انطباق و تعامل ایمن آنها را برای وظایفی که نیاز به دستکاری دقیق یا عملکرد در کنار انسان دارند، ایدهآل میکند،” او اضافه میکند.

با این حال، به گفته کریستف کپ لینگر ، مدیر MPI-IS و سرپرست گروه تحقیقاتی، پای رباتیک هنوز به طور کامل مستقل نیست، زیرا همچنان به سیستمهای قدرت و کنترل خارجی وابسته است.
“پا در حال حاضر به یک چوب متصل است و در دایره حرکت میکند و هنوز نمیتواند آزادانه حرکت کند،” او گفت. “اگر پای رباتیک را در یک ربات چهارپای یا یک ربات انساننما با دو پا ترکیب کنیم، شاید روزی، وقتی باتریدار شود، بتوانیم آن را به عنوان یک ربات نجاتدهنده استفاده کنیم.”
کپ لینگر اشاره دارد که در حالی که حوزه رباتیک در سالهای اخیر پیشرفتهای چشمگیری داشته است، هنوز کمبود داده جامع در مورد سختافزار رباتیک وجود دارد. “این انتشار یک یادآوری قدرتمند از میزان بالقوه نوآوری مخرب است که از معرفی مفاهیم جدید سختافزاری مانند استفاده از عضلات مصنوعی میآید،” او نتیجهگیری میکند.