
iRonCub3: اولین ربات انساننمای مجهز به جت ممکن است به تحولات امدادرسانی در زمان فجایع کمک کند
رباتیکدانان مؤسسه فناوری ایتالیا (IIT) پیشنمایشی از منطقه آزمایشی و تأییدات اولیه اولین ربات انساننمای مجهز به جت جهان را ارائه دادهاند.
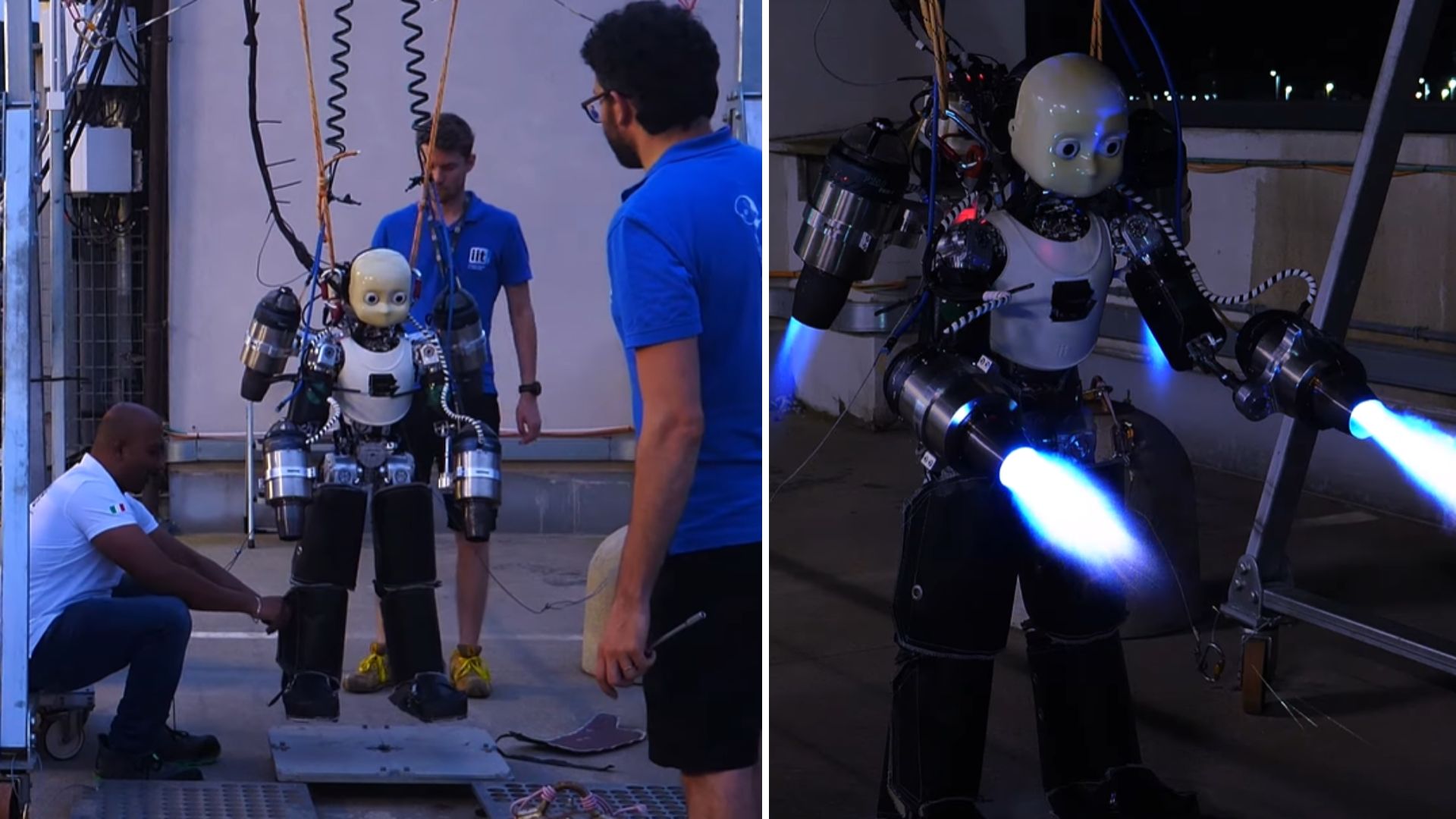
این ربات به نام iRonCub، با چهار موتور جت فشرده تجهیز شده که به آن توانایی پرواز و انجام مأموریتهای پیشرفته میدهد.
محققان معتقدند که توانایی پرواز میتواند در کاربردهای خاصی از جمله امدادرسانی در زمان فجایع برای این رباتها مفید باشد، زیرا این حوزه تحقیقاتی هنوز برای رباتهای انساننما ناشناخته است.
با شروع آزمایشها از سال 2021 ، تیم IIT با چالشهایی در حین آزمایشها مواجه شدهاند، زیرا تلاش کردهاند ربات خود را از آتشگرفتن یا حتی انفجار به دلیل گازهای خروجی موتور جلوگیری کنند.
رباتیک نسل بعدی
تیم تحقیقاتی نمونههای اولیه iRonCub را با استفاده از پلتفرمهای iCub v2.5 و v3.0 توسعه دادهاند. iCub یک ربات انساننمای تحقیقاتی است که توسط IIT ایجاد شده و برای توسعه و آزمایش الگوریتمهای هوش مصنوعی تجسمیافته طراحی شده است.
iCub دارای 53 درجه آزادی است، نه در هر دست و بیشتر در قسمت بالای تنه. این ربات به پوست کامل بدن، حسگرهای نیرو/گشتاور، دوربینها، میکروفنها، ژیروسکوپها، شتاب سنجها و انکدرها در هر مفصل مجهز شده است.
در مورد iRonCub، هر دو نسخه دارای چهار موتور جت هستند که دو تا در بازوها نصب شده و دو تا به یک جتپک در پشت ربات متصل شدهاند. آزمایشهای فعلی بر روی نسخه iRonCub3 متمرکز است.
برای تطابق با موتورها ی خارجی، تغییرات مهمی در طراحی سختافزار iCub اعمال شده است، از جمله ایجاد یک ستون فقرات تیتانیومی جدید و افزودن پوششهای مقاوم در برابر حرارت برای حفاظت.
iRonCub3 که به موتورهای جت آموزش داده شده، وزنی حدود 70 کیلوگرم دارد. توربینها نیروی تراستی بیش از 1000N و دمای گازهای خروجی بیش از 600 درجه سانتیگراد تولید میکنند.
تیم تحقیقاتی در حال حاضر iRonCub3 را در یک منطقه پرواز و کنترل جدید آزمایش میکند و پیشرفتهای قابلتوجهی نسبت به iRonCub2 انجام شده است. iRonCub3 از چندی به بعد تعدادی پیشرفت نسبت به نسخه قبلی خود دارد.
بر پایه پلتفرم iCub3 ساخته شده، این نسخه تاندونها را حذف کرده و حسگرهای نیرو-گشتاور را در جتها یکپارچه کرده است. علاوه بر این، الکترونیک جدید طراحی شده و سیستمهای کنترل و برنامهریزی به نسل جدیدی ارتقا یافتهاند که در فرکانسهای بالاتر عمل میکنند.
طبق گفته محققان، این بهبودها به طور جمعی قابلیتها و عملکرد ربات را ارتقا میبخشد.
کنترل پرواز ربات انساننما
یکی از چالشهای کلیدی در رباتیک هوایی انساننما برنامهریزی مسیرها برای پرواز و پیادهروی و همچنین انتقال بین آنها است.
یک الگوریتم برنامهریزی مسیر مبتنی بر مومنتوم با استفاده از یک روش شلیک چندگانه مستقیم در زبان پایتون توسعه داده شده است تا این مشکل را برطرف کند. این برنامهریز از طریق شبیهسازی تأیید شده و به زودی بر روی ربات واقعی آزمایش خواهد شد.
برای کنترل پرواز، الگوریتمهایی طراحی شدهاند تا نگرش و موقعیت ربات را مدیریت کنند، با استفاده از بهینهسازی برنامهریزی چهارخط برنامهریزی محدود شده. به گفته محققان، این چارچوب قابل تطبیق با تعداد متغیر توربینهای جت بوده و از مطابقت با محدودیتهای فیزیکی اطمینان میدهد.
تیم تحقیقاتی ادعا میکند که این تحقیق پیچیدگیهای بسیار بیشتری نسبت به چالشهای رباتیک انساننمای سنتی دارد.
ترمودینامیک نقش حیاتی ایفا میکند، با گازهای خروجی توربین که به دمای حدود 800 درجه سانتیگراد و تقریباً به سرعت صوت میرسند. ایرویکهای سیستمهای چندگانه بدن به شبکههای عصبی با اجزای آموزشی فیزیکی برای ارزیابی در زمان واقعی نیاز دارند.
تنظیمات کنترلر باید عملگرهای پهنای باند بالا و پایین از جمله مفاصل و توربینها را یکپارچه کند. برنامهریزان موظف به تولید مسیرها برای هر دو دینامیک موتور و توربینها هستند.
محققان معتقدند که تأییدات آزمایشی حیاتی و خطرناک است و فضای بسیار کمی برای بداههپردازی وجود دارد.



