
محققان MIT در حال طراحی حشرههای روباتی هستند که قادر به حرکت از کندوهای مکانیکی بهصورت گروهی برای انجام وظایف دقیق گردهافشانی میباشند.
تیم، رباتهای پرنده کوچک خود را بهطور قابلتوجهی چابکتر و محکمتر از نسخههای قبلی طراحی کرده است، با الهام از آناتومی گردهافشانهای طبیعی مانند زنبورها.
رباتهای جدید میتوانند بیش از ۱۰۰۰ ثانیه در هوا معلق بمانند که بیش از ۱۰۰ برابر طولانیتر از نمونههای قبلی است. همچنین در طراحی جدید فضای کافی برای حمل حسگرهای کوچک یا باتریها وجود دارد که میتواند به آنها اجازه دهد آزادانه در خارج از آزمایشگاه پرواز کنند.
کوین چن، استاد همیار در دپارتمان مهندسی برق و علوم کامپیوتر (EECS) و نویسنده اصلی مقاله تحقیقاتی، در بیانیهای گفت: «مقدار پروازی که ما در این مقاله نشان دادیم احتمالاً طولانیتر از کل مقدار پرواز حشرههای روباتی در این زمینه بوده است. با عمر و دقت بهبودیافته این ربات، ما به برخی از کاربردهای بسیار هیجانانگیز مانند گردهافشانی کمکشده نزدیکتر میشویم.»
پیشرفت رباتهای حشرهای
یک روش گردهافشانی مصنوعی کارآمدتر میتواند به کشاورزان آینده اجازه دهد میوهها و سبزیجات را در انبارهای چندسطحی پرورش دهند و در عین حال تأثیرات زیستمحیطی کشاورزی را کاهش دهند.
اما وقتی به مقاومت، سرعت و چابکی میرسیم، گردهافشانهای طبیعی مانند زنبورها برترینهای رباتهای حشرهمانند هستند.
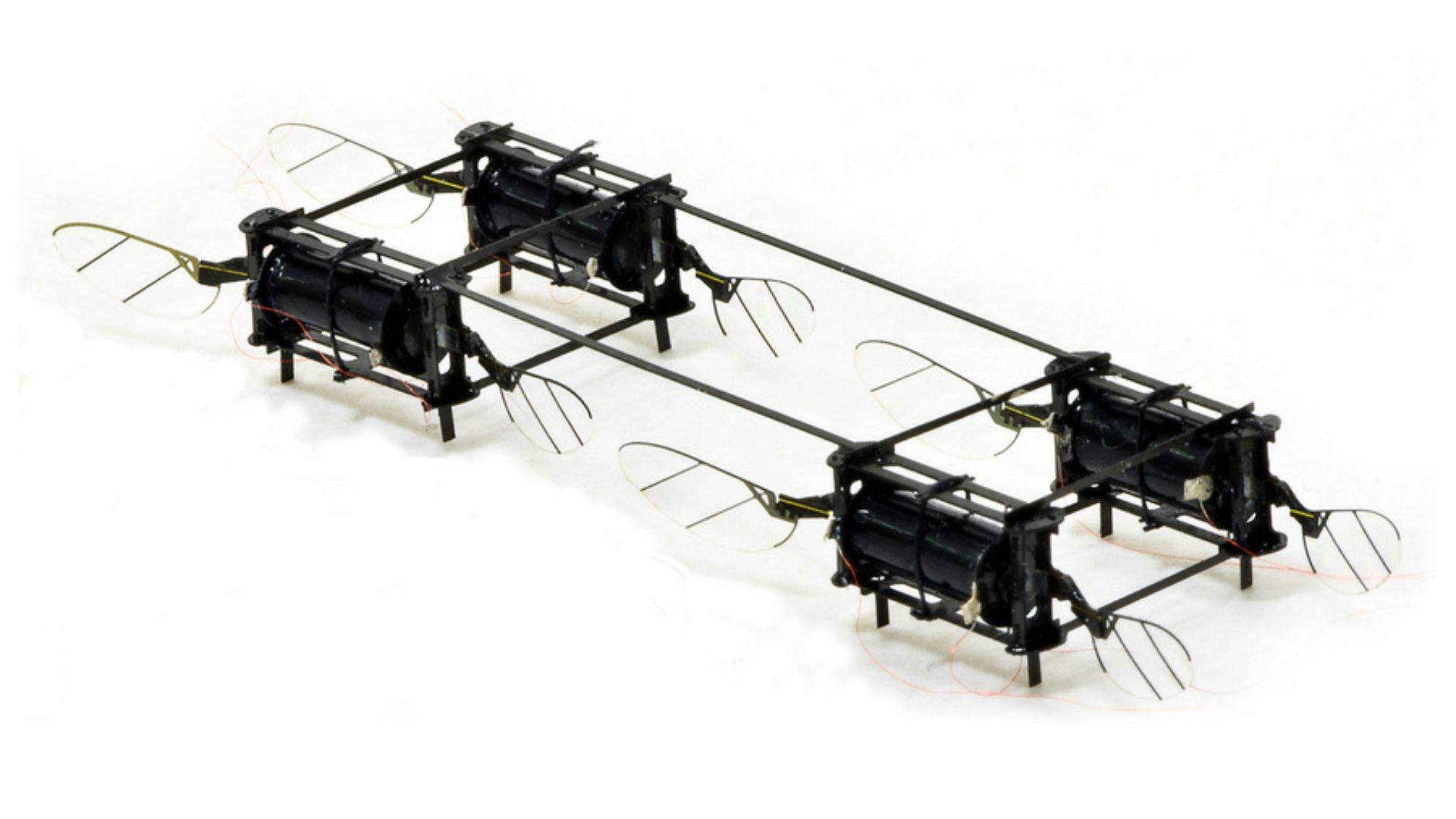
برای حل مشکلات طراحی حشرههای روباتی، محققان بر روی مدلهای قبلی که از چهار واحد یکسان با دو بال تشکیل شده بودند، بهبود یافتهاند. طراحی جدید ربات را به دو نیم تقسیم میکند و هر واحد را با یک بال بالزننده به بیرون مجهز میکند.
این آرایش پایداری بالها را افزایش داده، نیروهای بلندکننده را افزایش داده و تداخل بین بالها را کاهش میدهد. با نصف کردن تعداد بالها، طراحی فضایی برای الکترونیک ایجاد میکند. علاوه بر این، انتقالهای پیچیدهتر اکنون بالها را به عملگرها متصل میکند، تنش مکانیکی را کاهش میدهد و دوام را افزایش میدهد.
به گفته تیم، این انتقالها دارای لولاهای بال طولانیتری هستند که دوام را افزایش داده و محدودیتهای مشاهدهشده در نسخههای قبلی را رفع میکنند، و باعث افزایش کارایی و چندمنظوره بودن رباتها میشوند.
چن در بیانیهای گفت: «در مقایسه با ربات قدیمی، اکنون میتوانیم گشتاور کنترلی سه برابر بزرگتر از قبل تولید کنیم، به همین دلیل میتوانیم پروازهای بسیار پیچیده و دقیق را انجام دهیم.»
با وجود این بهبودهای طراحی، حشرههای روباتی هنوز تواناییهای همتایان طبیعی خود را ندارند. یک زنبور تنها با دو بال، حرکات سریع و به شدت کنترل شدهای را انجام میدهد. این دقت توسط مجموعهای از عضلات پیچیده و خوب تنظیمشده امکانپذیر میشود، سطحی از پیچیدگی که همچنان محققان را مجذوب خود کرده اما هنوز دور از دسترس طراحیهای روباتیک کنونی است.
گردهافشانی نسل بعدی
بالهای حشره روباتی با عضلات مصنوعی، عملگرهای کوچک ساخته شده از لایههای الاستومر و الکترودهای نانولوله کربنی که به سیلندرهای نرم تبدیل شدهاند، نیرو میگیرند. این عملگرها به سرعت فشرده و کشیده شده و نیروی مکانیکی لازم برای بال زدن را تولید میکنند.
طرحهای قبلی در فرکانسهای بالا با مشکل خمیدگی مواجه بودند که باعث کاهش قدرت و کارایی میشد. برای رفع این مشکل، طراحی جدید شامل انتقالاتی است که از خمیدگی جلوگیری کرده، تنش را کاهش میدهد و امکان اعمال نیروی بیشتر را فراهم میکند.
بهبود دیگر شامل لولاهای بالی بلند است که تقریباً 2 سانتیمتر طول دارند و ۲۰۰ میکرون در قطر هستند که به حداقل رساندن تنش پیچشی در طول حرکت کمک میکند. ساخت این لولاها نیاز به برش لیزری دقیق چندمرحلهای داشت تا از مشکلات تطابقی که میتواند بر حرکت بال تأثیر بگذارد جلوگیری شود.
با این بهبودها، ربات به عملکرد خارقالعادهای دست یافته و میتواند بیش از 1000 ثانیه (تقریباً 17 دقیقه) بدون کاهش در پرواز شناور بماند. به سرعت بالای 35 سانتیمتر در ثانیه میرسد، چرخشها و تلنگرها انجام میدهد و حتی مسیرهای دقیقی مانند "M-I-T" را ترسیم میکند و پیشرفتهای قابلتوجهی در کنترل و دوام نشان میدهد.
تیم هدف دارد مدت زمان پرواز را به بیش از 10,000 ثانیه افزایش دهد و دقت رباتها را برای وظایفی همچون فرود آمدن بر روی گلها بهبود بخشد. اهداف بلندمدت شامل تجهیز رباتها به باتریها و حسگرهای کوچک برای امکان پرواز و ناوبری مستقل در خارج از آزمایشگاه است.
چن در بیانیهای گفت: «این پلتفرم رباتی جدید یک نتیجه بزرگ از گروه ماست و به بسیاری از جهات هیجانانگیز میانجامد. به عنوان مثال، افزودن حسگرها، باتریها و قابلیتهای محاسباتی به این ربات در سه تا پنج سال آینده تمرکز اصلی خواهد بود.»
جزئیات تحقیق در مجله Science Robotics منتشر شده است.
-

-

-

-

