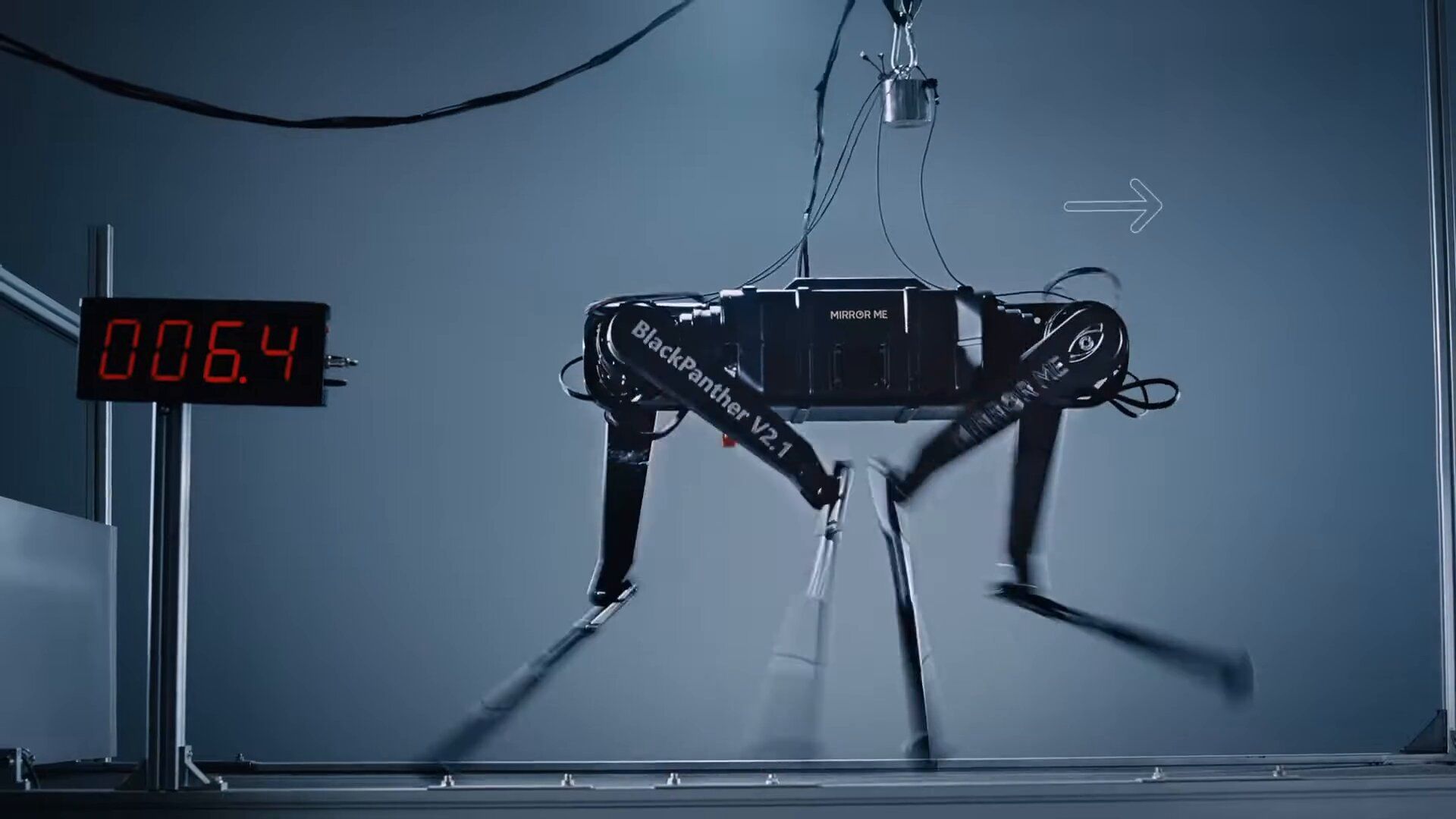
یک شرکت چینی یک ربات چهارپا را معرفی کرده که میتواند در کمتر از ۱۰ ثانیه ۱۰۰ متر را بدود، و مرزهای رباتیک را به چالش کشیده است.
ربات سگ بلک پنتر ۲.۰ نتیجه همکاری میان موسسه نوآوری انساننماهای دانشگاه ژجیانگ و استارتاپ Hangzhou-based mirrors me است.
به گزارش یک آژانس خبری چینی، طراحی این ربات بر اساس پاها و مفاصل جرابوا و پلنگ سیاه بوده که سرعت و چابکی حرکتی آن را با تاکید بر قدرت، توان، تطبیقپذیری، سیالیت و دقت بهبود میبخشد.
با استفاده از این ربات، تیم امیدوار است که در نهایت از نظر سرعت و چابکی از حیوانات واقعی پیشی بگیرد.
در سال ۲۰۲۳، یک ربات چهارپا به نام HOUND رکورد گینس برای سریعترین ۱۰۰ متر برای یک ربات چهارپا را ثبت کرد.
تکنولوژی با سرعت ترکیب میشود
ربات بلک پنتر ۲.۰، با وزن ۸۳ پوند (۳۸ کیلوگرم) و ارتفاع ۲٫۰۷ فوت (۰٫۶۳ متر)، میتواند در کمتر از ۱۰ ثانیه ۱۰۰ متر را بدود و رکورد قبلی برای یک ربات چهارپا را بشکند.
با الهام از حرکات پلنگان و جرابواها، از فنرهایی در مواقف مفاصل استفاده میشود تا شوک را جذب کند و سرعت را حفظ کند. به نقل از شینهوا، نیروهای کربنی پاها، که به مدل جرابوا طراحی شدهاند، سختی را به میزان ۱۳۵ درصد بهبود میبخشند، با افزایش وزن تنها ۱۶ درصد. «کفشهای دویدن» با الهام از چیتا چسبندگی را به میزان ۲۰۰ درصد افزایش میدهند.
با کمک هوش مصنوعی و یادگیری ماشینی، ربات حرکات خود را بر روی زمینهای مختلف تطبیق میدهد و با استفاده از مفهوم پاندول مرتبط هوینگن حركت سیال اعضای خود را همزمان میكند.
قدرت و دقت استثنایی از سوی موتورها با دانسیته قدرت بالا ایجاد میشوند، راه را برای کاربردهای صنعتی آینده هموار میکنند. بلک پنتر ۲.۰ اکنون یکی از سریعترین و کارآمدترین رباتهای چهارپا است.
“ما با تلفیق نرمافزار و قطعات، ظرف سه ماه توانستیم نمونهای اولیه ایجاد کنیم،” وانگ هونگتائو، رئیس موسسه و استاد دانشگاه ژجیانگ میگوید، گزارش
Xinhu
a
.
اگرچه هنوز از حیوانات زمینی برتری مثل چیتا، شترمرغ و آنتلوپ عقبتر است، بلک پنتر ۲.۰ اکنون میتواند از بیشتر انسانها در دویدن پیشی بگیرد. با این امید که در نهایت سرعت و چابکی آنها را پشت سر بگذارد، تیم تحقیق میخواهد بیشتر درباره چگونگی تفاوت حرکت رباتها و اجسام طبیعی بیاموزد.
پیشرفت حرکت دینامیک
دارنده رکورد قبلی در این دستهبندی HOUND بود، که توسط آزمایشگاه کنترل روباتیک دینامیک و طراحی در مؤسسه پیشرفته علوم و فناوری کره در دایجون، کره جنوبی توسعه یافت. این ربات مسافت ۱۰۰ متر را در ۱۹٫۸۷ ثانیه طی کرد.
با وزن ۹۹ پوند (۴۵ کیلوگرم)، تقریباً معادل با یک بولداگ نر بالغ آمریکایی، HOUND دارای پاهای سبک و ویژهای برای دویدن است. اکتواتورهای ران و زانو به صورت موازی قرار گرفته اند، با استفاده از یک سیستم پولی کمربند، حرکات زانو را به مفصل منتقل میکنند و اجازه میدهند طیف کاملی از حرکت داشته باشند.
تیم پشت HOUND بر اهمیت موتور تاکید کرد، و عملکرد لحظهای و دائم را به عنوان عوامل کلیدی در انتخاب یک موتور برای حرکت با پای دینامیک مطرح کردند.
محققان دانشگاه فنی مونیخ (TUM) در نوامبر ۲۰۲۴ ابزاری ساختند که با استفاده از الگوهای نوسان طبیعی بدن انسان و حیوان، حرکتپذیری رباتها را بهبود میبخشد. دستگاه بر روی یک سگ ربات به نام BERT آزمایش شد و به تعیین اقدامات با کمترین مصرف انرژی کمک میکند.
در آزمایشهای کنترل حرکت،
BERT
عملکرد رباتهایی که از تکنیکهای معمول استفاده میکردند را با زمانبندی دقیق اعمال این الگوهای نوسان طبیعی برای تولید حرکتی سریعتر و دینامیکتر شکست.