
آزمایش رباتهای زیرآبی کوچک ناسا برای ماموریتهای اکتشاف اقیانوسهای ماههای یخی
ناسا رباتهای زیرآبی کوچکی طراحی کرده است که برای اکتشاف اقیانوسهای پنهان ماههای یخی ساخته شدهاند.
این پروتوتایپ که به نام SWIM (Sensing With Independent Micro-swimmers) شناخته میشود، در آزمایشگاه پیشرانش جت ناسا (JPL) در جنوب کالیفرنیا ساخته شده است تا عملی بودن مفهوم این ماموریت را نشان دهد.
رباتها در آزمایشهایی که در سپتامبر 2024 در استخر موسسه تکنولوژی کالیفرنیا (Caltech) انجام شد، مانورپذیری چشمگیری از خود نشان دادند.
پروتوتایپ کوچک به شکل گوه در ژوئیه 2023 با یک کپسول سنسور زیر میدان یخی جونئو در آلاسکا آزمایش شد.
رُباتهای زیرآبی دستهای
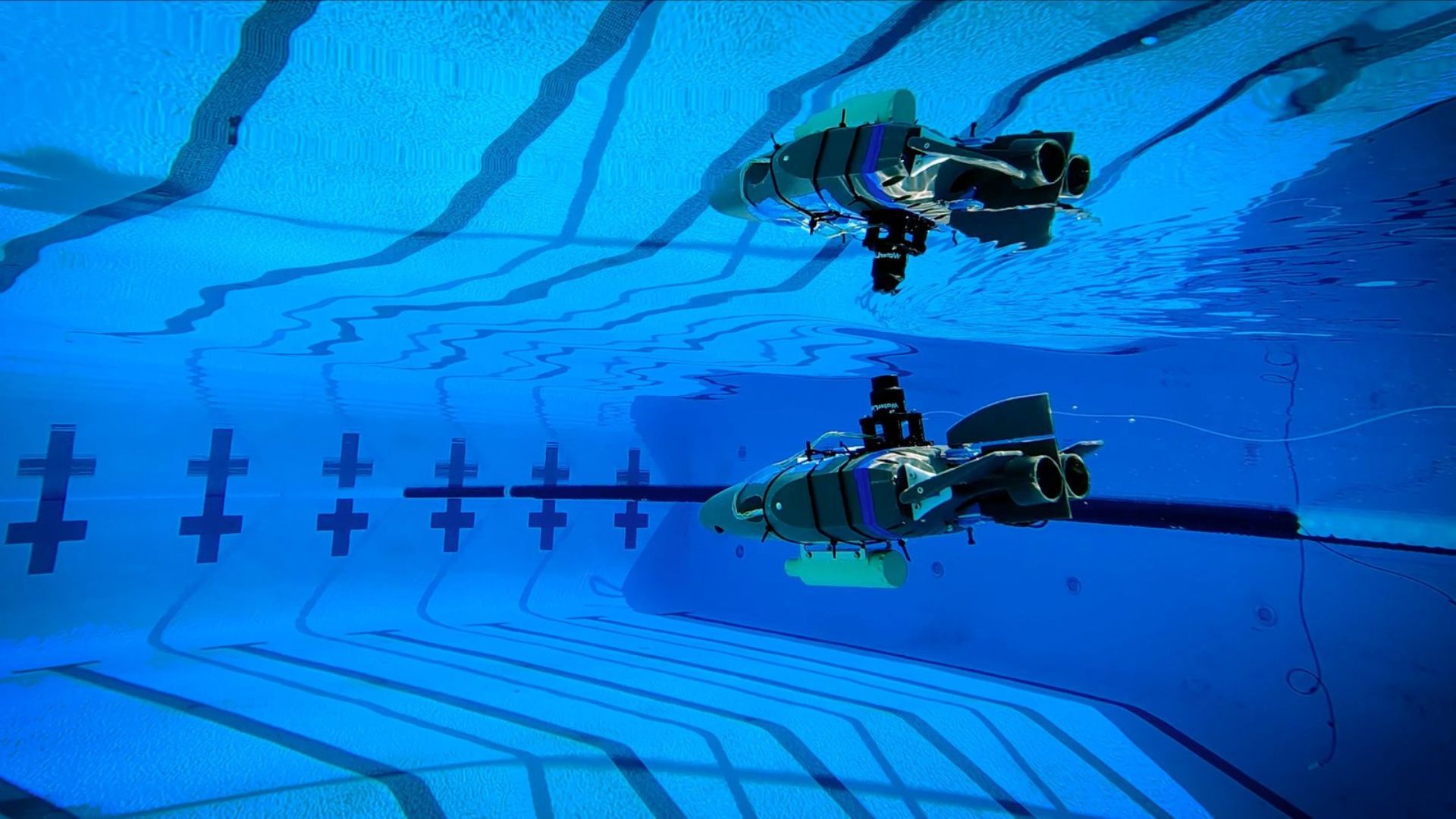
پروژه SWIM ناسا محقق شدن دستهای از رباتهای زیرآبی به اندازه گوشیهای موبایل را تصور میکند که در اقیانوسهای زیر سطحی ماههای یخی مانند اروپا، ماه ژوپیتر، و انسِلادوس، ماه زحل، به اکتشاف میپردازند. یک کریوبات، که یک پروب مخصوص ذوب یخهای ضخیم است، این رباتهای کوچک را زیر یخها میبرد. رباتها پس از ورود به اقیانوس پراکنده میشوند و به دنبال علائم دما و شیمیایی که ممکن است به وجود حیات اشاره داشته باشند میگردند. آزمایشهای اخیر در Caltech حرکت مانورپذیری پروتوتایپ را در یک محیط استخرشنا نشان داد. این پروتوتایپ با طول 16.5 اینچ (42 سانتیمتر) و وزنی 5 پوند (2.3 کیلوگرم) اندازهگیری شد.

“در آزمایشهای استخر، پروتوتایپ سمت چپ مانورپذیری کنترلشده، توانایی باقیماندن و تصحیح مسیر خود، و الگوی اکتشاف بازگشتی “چمنزنی” را به نمایش گذاشت. تمام اینها را بدون دخالت مستقیم تیم بهطور خودمختار مدیريت کرد. ربات حتی “J-P-L” را هجی کرد، بر اساس بیانیه ناسا.
طبق بیانیه ناسا، رباتهایی که برای سفر فضایی طراحی شدهاند بسیار کوچکتر خواهند بود، با ابعاد تقریبی یکسوم اندازه پروتوتایپ. این به آنها اجازه میدهد تا در محیطهای بیگانه پیچیده و محدود عملکرد کنند زیرا آنها نسبت به وسایل علمی زیرآبی موجود کوچکتر هستند.
با ارائه یک روش بسیار انعطافپذیر برای تحقیق در محیطهای بالقوه قابل سکونت، رویکرد نوین SWIM میخواهد نحوه تحقیق دانشمندان در مورد سیارات اقیانوسی دوردست را بهبود ببخشد. ناسا ادعا میکند که با استفاده از دستهای از رباتهای کوچک و خود پیشران، این ماموریت شانس یافتن حیات فرازمینی را افزایش داده و دانش ما از کیهان را پیش میبرد.
جستجوی حیات رباتی
در ژوئیه 2023، یک مدل کوچک
چاپ سهبعدی شده
ربات
در حدود 5 اینچ (12 سانتیمتر) طول، در میدان یخی جونئو آلاسکا آزمایش شد.
طراحی شده برای SWIM ناسا، این مدل اندازه رباتهای آینده را که برای اکتشاف اقیانوسهای زیرسطحی در ماههای یخی مانند اروپا و انسِلادوس هدفگذاری شده است، نشان میداد.
آزمایش آلاسکا شامل یک کپسول ضدآب بزرگ بود که اولین نسل سنسور ترکیب اقیانوس توسعهیافته توسط Georgia Tech برای رباتهای SWIM را شامل میشد. این سنسور ترکیب شیمیایی، هدایت، دما، فشار و اسی یا قلیاییت را بهطور همزمان اندازهگیری میکند.

برای اندازهگیری هدایت و فشار در عمقهای تا 164 فوت (50 متر)، تیم مجبور شد تا کپسول را از یک حفره در طول آزمایش پایین کنند.
این آزمایش میدانی بخشی از ORCAA (
اقیانوسها
جهانها، شناسایی و شخصیتسازی نمونههای آستروبایولوژیکالی) بود، پروژهای که توسط JPL اداره شده و هدف آن آزمایش فناوری و پاسخگویی به مسائل علمی برای اکتشاف سطحی یا زیرسطحی آینده ماههای یخی است.
با آزمایش فناوری جدید و شبیهسازی محیطهای بیگانه، ORCAA امید دارد که برای ماموریتهای آینده آماده شود. ORCAA و SWIM، که توسط برنامه علوم سیارهای و فناوری از تحقیقات مشابه ناسا پشتیبانی میشوند، توسعههای مهمی در جستجوی حیات فرازمینی بهشمار میآیند.



