
بازوی رباتیک ۷۲ فوتی اولین زبالههای رادیواکتیو را از راکتور فوکوشیما استخراج میکند

شرکت برق توکیو (TEPCO) که نیروگاه هستهای فوکوشیما دایایچی را مدیریت میکند، یک ربات عظیم را برای بازیابی اولین نمونه سوخت از یک راکتور معرفی کرده است. این اقدام ۱۳ سال پس از زلزله مخرب و سونامی که موجب ذوب و نشت رادیواکتیو در محل شد، صورت گرفت. این دستگاه رباتیک دارای بازوئی با طول ۷۲ فوت و وزن ۴.۶ تن میباشد.
در ۱۱ مارس ۲۰۱۱، زلزلهای با قدرت 9.0 ریشتر شرق ژاپن را تکان داد و سونامی باعث قطع برق در ایستگاه هستهای فوکوشیما دایایچی شد که به ذوب راکتورها منجر شد. تخمینها نشان میدهند که ۸۸۰ تن سوخت هستهای شدیداً رادیواکتیو در زیر سه ساختمان راکتور در سایت باقیمانده است.
مادهای که توسط TEPCO به عنوان “زبالههای سوخت” شناخته میشود، یک مخلوط رادیواکتیو است که با ذوب و جوش خوردن مواد حاوی اورانیوم، زیرکونیم و عناصر دیگر ایجاد شده است. این ماده بعد از سرد شدن جامد شده است. TEPCO فرض میکند که این مخلوط درون محفظههای اولیه راکتور قرار دارد، اما ترکیب و خصوصیات دقیق آن هنوز مشخص نیست و نیاز به تحلیلهای بیشتر دارد.
روباتها به کمک میآیند
TEPCO شروع به از کار انداختن نیروگاه هستهای کرده است؛ فرایندی که انتظار میرود دههها به طول انجامد. این تلاشها شامل استفاده از روباتهای مختلف برای کارهای مختلف از جمله بررسی ساختمانها و اندازهگیری سطح تشعشع است. اما تا کنون، TEPCO رباتی برای برداشتن نمونهای از سوخت نداشت.
پس از سالها برنامهریزی و تحلیل، TEPCO یک شیر ایزوله در PCV به عنوان محلی برای منبعیابی نمونه شناسایی کرده است. اما نیاز به یک ربات تخصصی برای انجام این کار داشتند.
TEPCO با همکاری صنایع سنگین میتسوبیشی، مؤسسه پژوهشی بینالمللی برای از کار انداختن هستهای و شرکت Veolia Nuclear Solutions، که یک شرکت مستقر در بریتانیا است، بازوی رباتیکی طراحی کرده که میتواند وارد PCV شود و یک نمونه از سوخت را بگیرد.
ربات چگونه کار میکند؟
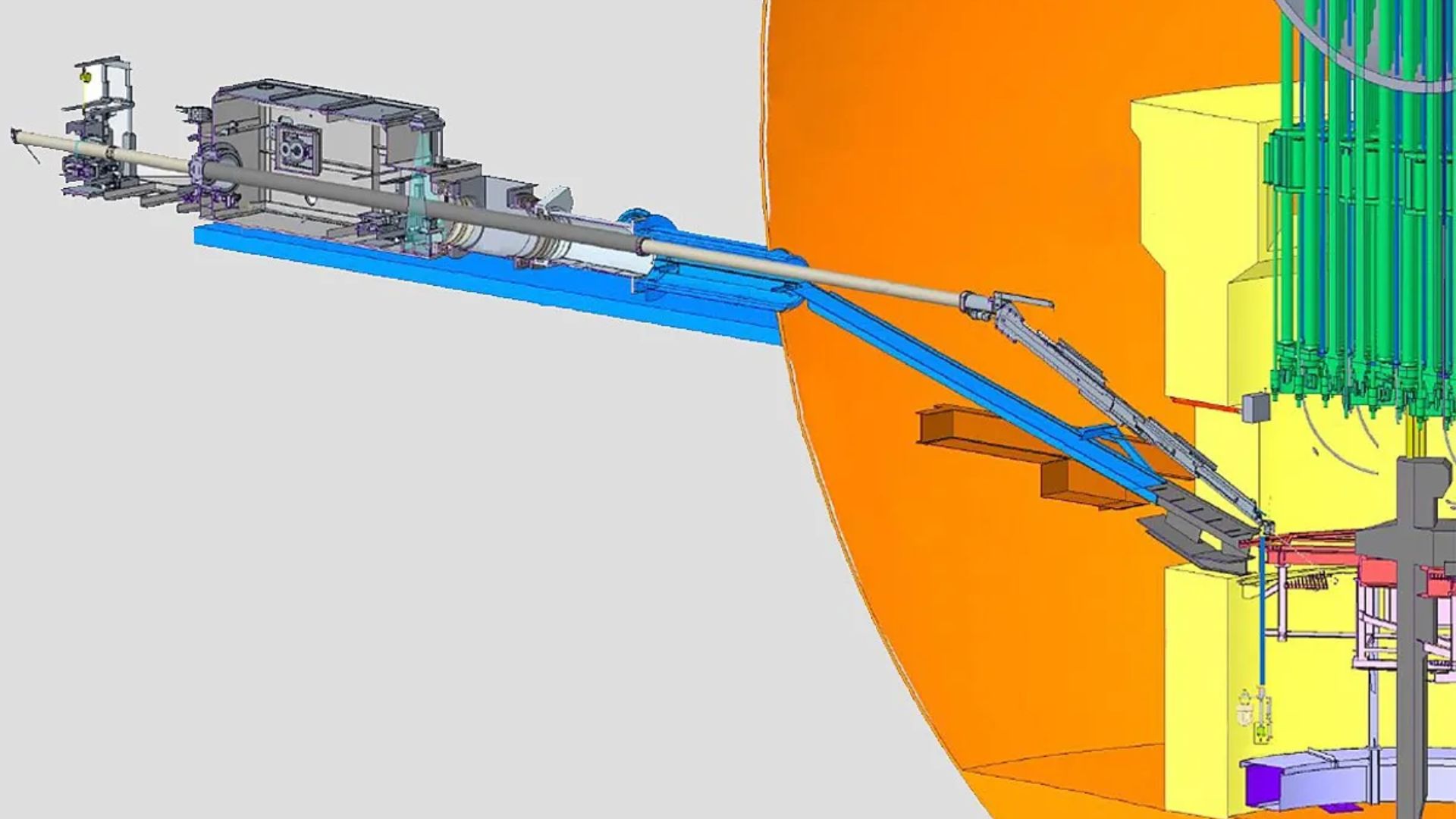
ربات با استفاده از فولاد ضد زنگ و آلومینیوم ساخته شده است و دارای بازویی به سبک بوم است که میتواند در ۱۸ درجه آزادی حرکت کند.
بازوی ربات از چهار بخش اصلی تشکیل شده است: یک دستگاه متحرک طراحی شده برای حرکت از طریق بازشوها، بخشهای انعطافپذیر بازو که بر اساس نیاز میتوانند گسترش یابند، بخشهای تلسکوپی مجهز به دوربین و یک گرپر خاص برای جمعآوری نمونهها. این گرپر دارای پینسرهای کوچک و دقیقی است که قادر به گرفتن ذرات خیلی کوچک زباله از کف محفظه اولیه راکتور (PCV) است.

TEPCO قصد دارد بازوی رباتیک را در واحد ۲ نیروگاه که در طول فاجعه نسبتاً سالم باقی مانده بود، استفاده کند. اعتقاد بر این است که این واحد حدود ۲۳۷ تن سوخت هستهای را در خود دارد. بازو برای دقت طراحی شده و قادر به استخراج نمونهای کوچک از سه گرم سوخت است، در حالی که مزاحمتی برای منطقه اطراف ایجاد نمیکند.
زبالهها به یک کانتینر منتقل شده و به سطح برای آزمون اولیه بازگردانده میشوند، و پس از آن در مؤسسه انرژی اتمی ژاپن تحلیلی عمقی انجام خواهد شد.
پس از تأیید از سوی اداره تنظیم مقررات هستهای ژاپن، ربات ماه گذشته تلاشی برای بازیابی زبالهها از سایت انجام داد و موفق به آوردن برخی به سطح شد. اما دو دوربین آن در طول عملیات عملکرد نامطلوبی داشتند که احتمالاً به دلیل نفوذ تشعشع به اجزای نیمههادی بود.
یک گزارش تحلیل بر روی زبالهها هنوز در انتظار است، به گزارش IEEE Spectrum .



