تحقق اولین آندوسکوپی مغناطیسی کنترل از راه دور در ۵,۷۷۸ مایل فاصله

محققان مؤسسه فناوری فدرال سوئیس زوریخ (ETH زوریخ) و دانشگاه چینی هنگکنگ (CUHK) یک گام برتر در علم پزشکی را با انجام آندوسکوپی مغناطیسی به طور از راه دور روی یک خوک زنده به تحقق رساندند.
تیم زوریخ این عمل را کنترل میکرد در حالی که خوک در اتاق عمل در هنگکنگ، ۵,۷۷۸ مایل (۹,۳۰۰ کیلومتر) آنسوتر قرار داشت.
اتصال سریع و امن اینترنت و یک سیستم ناوبری مغناطیسی با آندوسکوپ مغناطیسی که در ETH زوریخ توسعه یافته بود، عوامل کلیدی این موفقیت بودند.
طبق گفته تیم، با توجه به فناوری، ممکن است در آینده مراقبتهای جراحی بهتری در مکانهای دوردست امکانپذیر شود، به ویژه برای جراحیهایی که تجربه محلی برای آنها وجود ندارد.
پیشرفت جراحی تلهعملیات رباتیک
جراحی تلهعملیات رباتیک یک حرفهای پر سرعت در حال گسترش است که اشتراک تخصص از راه دور و توانایی فراگیری مرزهای جغرافیایی برای محدودهای از درمانهای کمتهاجمی را فراهم میکند.
ناوبری مغناطیسی رباتیک یک فناوری بهویژه امیدوارکننده برای تلهعملیات است. بر خلاف رباتهای جراحی سنتی، سیستم ناوبری مغناطیسی رباتیک میدانهای مغناطیسی خارجی ایجاد میکند تا دستگاههای مغناطیسی نرم را داخل بدن انسان با اطمینان و مهارت هدایت کند.
این پلتفرم برای تلهعملیات به طور انعطافپذیر، مقرون به صرفه و به راحتی قابل دسترس است و میتواند برای محدودهای از درمانها استفاده شود.
تکنیک جدید آزمایش شده که در همکاری بین CUHK و ETH زوریخ توسعه داده شده بود، اولین آندوسکوپی کنترلشده از راه دور بود که روی یک خوک زنده انجام شد.
جراحان از CUHK فرآیند کنترلشده از راه دور را در اتاق عمل پشتیبانی و مشاهده کردند. تیم آزمایشگاه رباتیک چندمقیاس ETH و جراحان از هنگکنگ پروب را در اتاق عمل تست کردند قبل از اینکه یک متخصص در زوریخ ناوبری آن را به عهده بگیرد.
علاوه بر این، متخصص از طریق دهان خوک وارد معدهی آن شد و آندوسکوپ مغناطیسی را کشت کرد.
شانون ملیسا چان، استادیار در دانشکده پزشکی CUHK، در بیانیهای گفت: «تلهعملیات آندوسکوپی میتواند نه تنها برای آموزش جراحان استفاده شود، بلکه همچنین برای فراهم کردن مراقبتهای تشخیصی و جراحی در مناطق دوردست، به ویژه در جاهایی که کمبود تخصص محلی وجود دارد، مفید باشد. حتی میتوان به پرستاران آموزش دیده از راه دور دستورالعملهایی را برای انجام این روشها ارائه داد.»
موفقیت آندوسکوپ
این موفقیت توسط دو عنصر کلیدی امکانپذیر شد: یک اتصال اینترنتی سریع و امن به اتاق عمل و یک سیستم ناوبری مغناطیسی که در ETH زوریخ توسعه داده شده بود و شامل یک آندوسکوپ کنترلشده مغناطیسی بود.
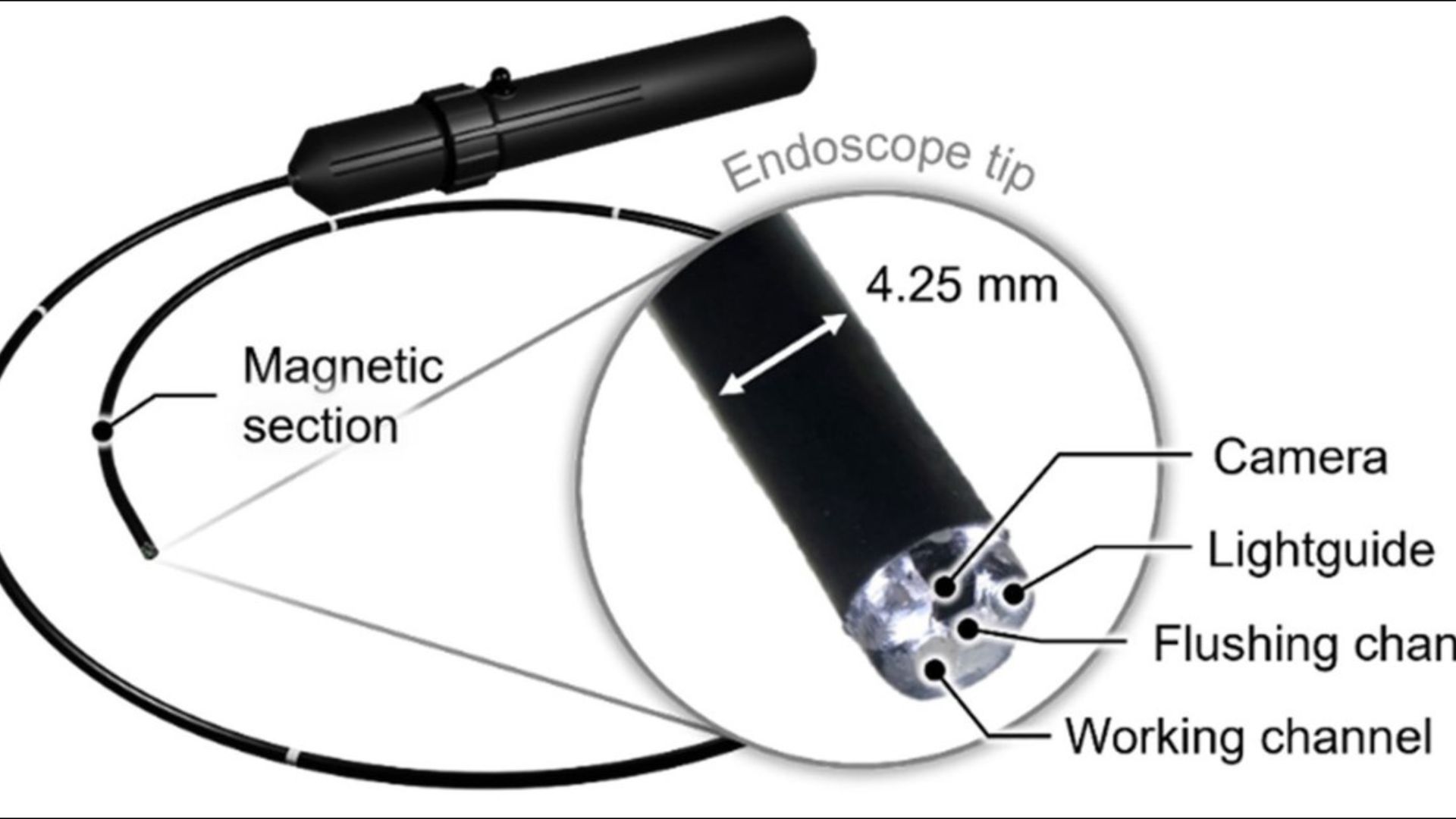
بردلی نلسون از ETH و همکارانش یک دستگاه ناوبری جراحی به نام ناویون ایجاد کردند. این دستگاه یک میدان مغناطیسی تولید میکند که آندوسکوپ را کنترل میکند.
آلکساندر مسوت، دانشجوی دکتری در آزمایشگاه رباتیک چندمقیاس، که فرآیند را کنترل میکرد، گفت: «آندوسکوپ نه تنها میتواند به هر جهتی خم شود به لطف سر مغناطیسیاش؛ بلکه همچنین کوچکتر و راحتتر قابل کنترل است نسبت به دستگاههای سنتی.»
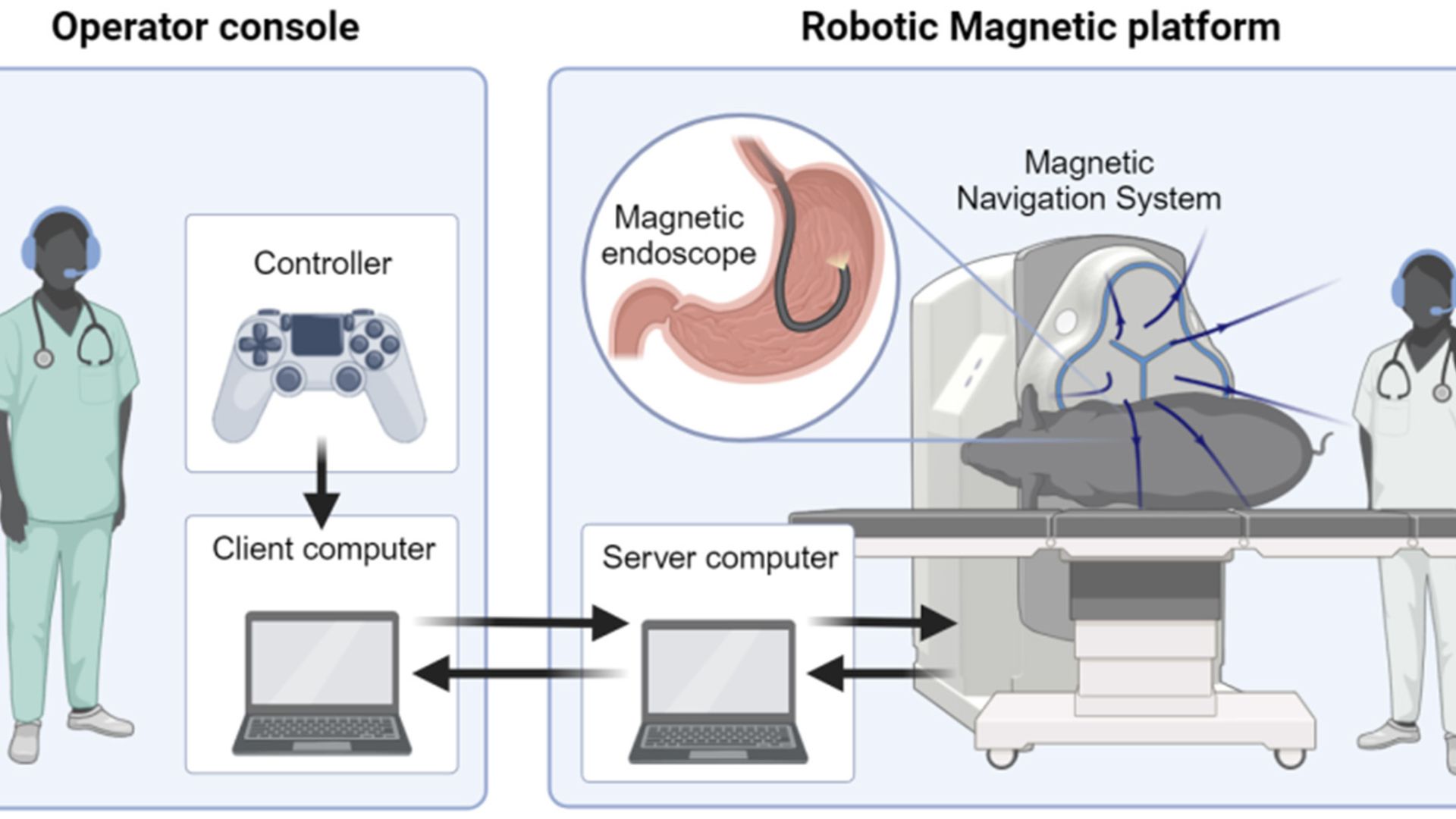
بعلاوه، مسوت سیستم تلهعملیاتی را با استفاده از یک کنسول کنترلی مدیریت کرد و یک عامل رباتیک در هنگکنگ دستورها را به اقدامات تبدیل کرد.
پروتکل ارتباطی رایانهای به نام وبساکت، که جریان دادههای بلادرنگ را به و از یک رایانه سرور امکانپذیر میسازد، برای برقراری ارتباط بین کنسول کنترلی و سیستم رباتیک استفاده شد.
تخت عمل در کنار رایانه سرور قرار داشت. همچنین، اتصال کابلی با تنظیمات رباتیک، یک آندوسکوپ مغناطیسی و ناویون، یک دستگاه ناوبری مغناطیسی قابل حمل برقرار شد.
انعطافپذیری آندوسکوپ مغناطیسی مسوت را قادر ساخت تا یک برگشتبند در معدهی خوک انجام دهد، دستگاه را ۱۸۰ درجه خم کند تا ورودی معده را به راحتی بازرسی کند.
به گفته محققان، این نشان میدهد که آندوسکوپهای مغناطیسی را میتوان با حداقل همان دقت دستگاههای استاندارد به طور از راه دور کنترل کرد.
علاوه بر این، آندوسکوپ کوچکتر را میتوان از طریق بینی در انسانها وارد کرد، نیازی به بیهوشی کامل را کاهش میدهد و آن را برای استفاده در کودکان مناسبت میسازد که در آنها پروبهای سنتی ممکن است بیش از حد بزرگ باشند.
«در قدم بعدی تحقیقاتی، امیدواریم که یک آندوسکوپی تلهعملیاتی روی معدهی انسان انجام دهیم. این فناوری پتانسیل زیادی دارد. اینجا من به روشهای کمتهاجمی در دستگاه گوارش، مانند غربالگری سرطان فکر میکنم»، نلسون گفت.