
ربات سگ تلهاپراتوری با دستهای هیدرولیکی مأموریتهای نجات از راه دور را ایمن میسازد
محققان مؤسسه فناوری ایتالیا (IIT) از یک ربات قدرتمند چهاپا با دستهای رباتیکی بزرگ رونمایی کردهاند که کنترل تلهاپراتوری انسان-ربات را بهبود میبخشد.
این سیستم که برای محیطهای خطرناک طراحی شده است، کنترلهای شهودی را با تحرک و چابکی پیشرفته ترکیب میکند و مرزهای عملیات رباتیک از راه دور را گسترش میدهد.
پروژه ربات تلهاپراتوری بر روی HyQReal ساخته شده است، جدیدترین ربات چهاپای هیدرولیکی در خط تولید IIT است.
کلودیو سمینی که هدایت پروژه ربات تلهاپراتوری در IIT را بر عهده دارد، به IEEE Spectrum گفت: «هدف اصلی این پروژه، که با همکاری INAIL انجام میشود، افزایش قابلیتهای انسانی برای ربات است، به طوری که اپراتورها بتوانند وظایف پیچیده را از راه دور در محیطهای خطرناک و ساختارنیافته انجام داده و از قابلیتهای ربات برای کاهش خطرات ایمنی بهرهمند شوند.»
قدرت هیدرولیکی آزاد شده
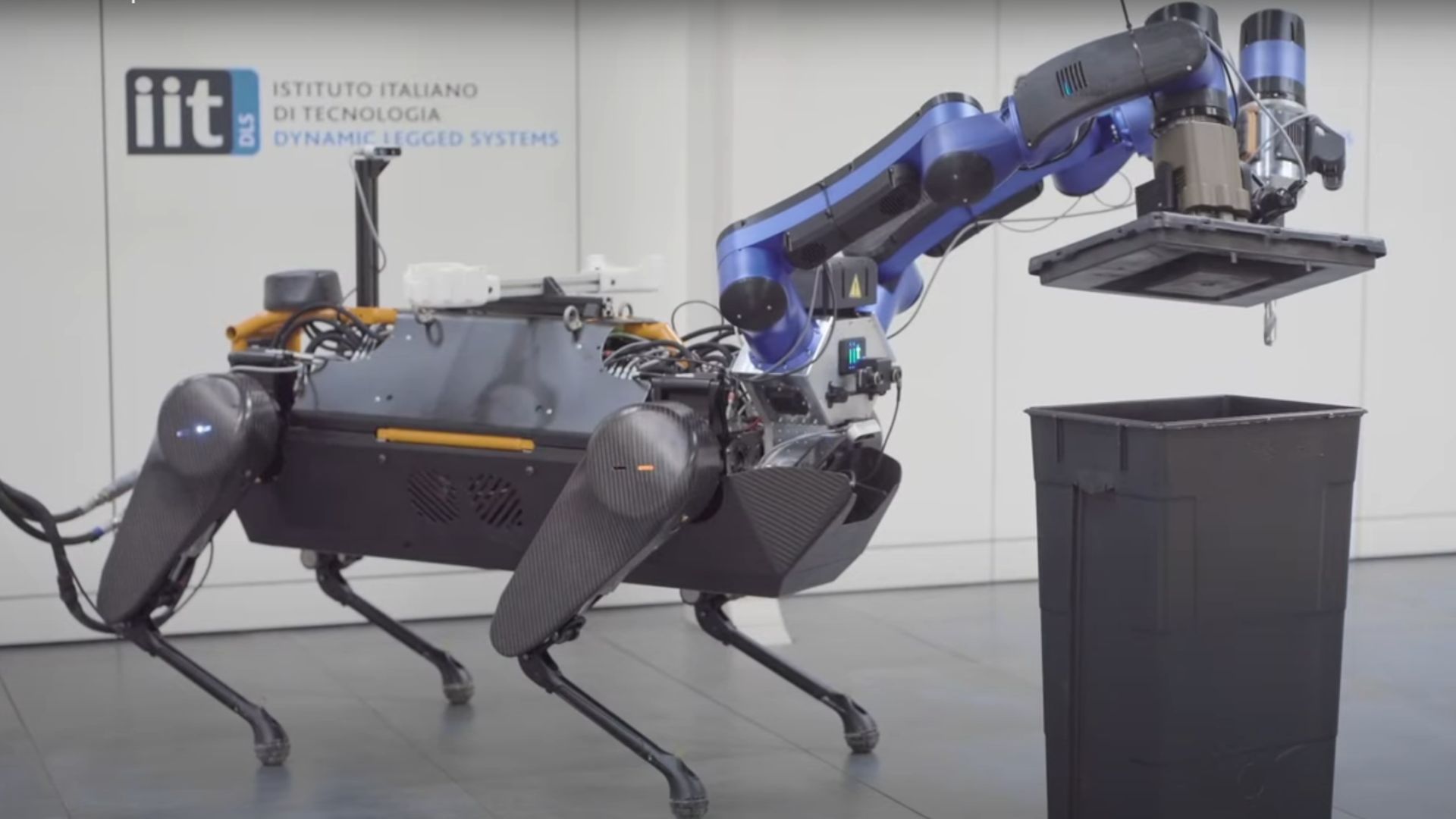
ربات هیدرولیکی بر روی پلتفرم HyQReal ساخته شده و دارای دستهای عظیمی است که توانایی آن در انجام کارهای پیچیده از راه دور را افزایش میدهد.
هرچند سیستمهای هیدرولیکی به دلیل پیچیدگی و مشکلات نگهداری کمتر در رباتیک مورد استفاده قرار میگیرند، اما برای کاربردهایی که نیاز به قدرت بالا و حمل بار سنگین دارند، ضروری هستند. در حالی که بسیاری از رباتها به محرکهای الکتریکی متکی هستند، سیستم هیدرولیکی HyQReal امکان حرکت پویا و ظرفیت تحمل بار چشمگیر را فراهم میکند.
در یک نمایش از قدرت آن، این ربات ۱۴۰ کیلوگرمی (۳۰۸ پوندی) زمانی توانست یک هواپیمای سه تنی را بکشد. مفاصل زانوهای آن تا ۳۰۰ نیوتونمتر گشتاور تولید میکنند و سیستم هیدرولیکی باتریمحور آن ۴ کیلووات قدرت ارائه میدهد. با یک قفسه آلومینیومی و پوسته کِولاری، HyQReal برای دوام در شرایط سخت ساخته شده است.
طبق گزارش IEEE Spectrum، برای تلهاپراتوری مؤثر، یک ربات باید کنترل شهودی و تحرک پیشرفتهای داشته باشد. HyQReal با رابط کاربری کنترل از راه دور که به اپراتورها امکان حرکت و دستکاری اشیا را میدهد، این الزامات را برآورده میکند.
دستهای مستقر بر روی سر ربات که در IIT توسعه یافتهاند، هرکدام ۱۰ کیلوگرم وزن دارند و میتوانند هرکدام ۵ کیلوگرم را بلند کنند. در مقایسه با ظرفیت حمل ۱۱ پوندی (۱۴ کیلوگرم) ربات Spot از بوستون داینامیکس، پیکربندی HyQReal قدرت و چابکی بیشتری فراهم میکند. موقعیت دستها به آنها اجازه میدهد تا به زمین برسند و برای دستکاری دو دستی با هم کار کنند، در حالی که چابکی روبوت چهاپایی دامنه آنها را گسترش میدهد.
یک عامل اصلی در توسعه این سیستم، فناوری تحریک آن است که برای خروجی قدرت بالا با وزن کم طراحی شده است. این باعث ایجاد یک سیستم دستکاری سبک و در عین حال قوی میشود که با HyQReal بهطور یکپارچه ادغام شده است.
از آنجا که رباتهای تلهاپراتوری باید با کنترل انسانی سازگار شوند، حداکثر بهرهوری و عملکرد تضمین میکند که اپراتورها بتوانند وظایف را به راحتی انجام دهند، بدون آن که توسط محدودیتهای مکانیکی محدود شوند.
تلهاپراتوری کارایی را افزایش میدهد
این پروژه بر چهار فناوری کلیدی استوار است که با همدیگر توسعه یافتهاند تا کاربردهای تحقیقاتی و عملی را به حداکثر برسانند. با شروع از ربات FIELD - این شامل بازوی Robotic INAIL-IIT و چهاپای هیدرولیکی HyQReal است که به عنوان یک پلتفرم رباتیکی قدرتمند با هم کار میکنند.
بعدی ایستگاه PILOT است که شامل سیستم تلهاپراتوری REMOTArm و HEXOTrAc-Plus میباشد. همچنین دارای یک رابط واقعیت مجازی سهبعدی غوطهور است که به کاربران اجازه میدهد تا ربات را از فاصله کنترل کنند.
پروژهای که با همکاری INAIL، موسسه ملی بیمه علیه حوادث کاری ایتالیا، انجام میشود، قصد دارد ایمنی محل کار را با استفاده از رباتیک برای مشاغل خطرناک بهبود بخشد.
تکرار قبلی ربات، که تنها یک دست داشت، در سال ۲۰۲۲ توسط آتشنشانان ایتالیایی برای خاموش کردن آتشی ساختگی در یک تونل مورد آزمایش قرار گرفت. هرچند نمونه امیدوارکنندهای بود، ولی برای نشان دادن کاربردپذیری عملی آن، پیشرفتهای آینده بر روی انجام کارهای بیشتر دشوار و پیچیده متمرکز خواهد بود.
بهبود دوام و قابلیت اطمینان در محیطهای سخت همچنان چالشبرانگیز است. ربات باید قادر به تحمل حرارت زیاد و قرارگیری طولانی مدت در معرض شعلهها باشد بدون اینکه افت عملکردی داشته باشد. چالش دیگر مصرف انرژی است که باید بهینهسازی شود تا مدت زمان عملکرد افزایش یابد.
همچنین، بهبود رابط کاربری ضروری است تا تعادلی بین بار شناختی و آگاهی از وضعیت ایجاد شود. اپراتورها ممکن است با اطلاعات بیش از حدی تحت فشار قرار بگیرند و اشتباهات ناشی از اطلاعات ناکافی بروز کند.
پژوهشگران پیشبینی میکنند که پیشرفتهای آینده در فرمانهای صوتی، کنترلرهای ردیابی چشم و رابطهای واقعیت ترکیبی به افزایش کارایی و کاهش خستگی در موقعیتهای با ریسک بالا کمک خواهند کرد.
یوناس تفرا، که رهبری توسعه این رابط کاربری غوطهور را بر عهده دارد، به IEEE Spectrum گفت: «پیشرفتها در رابطهای واقعیت ترکیبی و کنترلهای چندحالته، مثل فرمانهای صوتی و ردیابی چشم، انتظار میرود که کارایی را بهبود ببخشد و خستگی را در آینده کاهش دهد.»
جزئیات تحقیقات تیم در مجله IEEE Xplore منتشر شده است.



