
ربات نرم با ورودی هوای واحد برای حرکت متنوع میخزد، صعود میکند و تغییر شکل میدهد
پژوهشگران یک ربات نرم توسعه دادهاند که قادر به خزیدن مانند کرم، بالا رفتن از کابلها و تغییر سریع شکل برای تغییر جهت میباشد - همگی با یک ورودی هوا.
روباتهای نرم انعطافپذیر هستند، اما معمولاً برای حرکت دقیق نیاز به سیستمهای پیچیده دارند. برای کمک به این مسئله، طراحی جدید از ساختار متا مودولار بادوام ضربهای (SIMM) استفاده میکند تا با یک منبع هوایی شکل خود را به نرمی تغییر دهد و شکل را به سرعت تغییر دهد، که این باعث پیشرفت در کنترل حرکت بدون نیاز به ورودیهای متعدد میشود.
به گفته تیم سئول دانشگاه ملی، نوآوری آنها یک روش جدید به روباتیک نرم معرفی میکند، که اجازه تطبیق و جابجایی بیشتری در محیطهای مختلف فراهم میکند.
تیم در مطالعه آمده است، این تحقیق قابلیتهای تغییر شکل از یک منبع ورودی را به پیش میبرد و امکانات جدیدی برای کاربردها مانند جراحی کمتهاجمی و جستجو و نجات باز میکند.
تغییر شکل تطبیقی
محرکهای نرم برای توانایی خود در تعامل انعطافپذیر با محیطهای پیچیده توجه جلب کردهاند، که وظایف فراتر از تواناییهای روباتهای سفت و سخت کلاسیک را ممکن میسازد.
اگرچه تغییر شکل به شدت امکان جابجایی اشیاء و حرکت آنها را در محیطهای دشوار فراهم میکند، کنترل دقیق هنوز هم دشوار است. طراحیهای معمولی تطبیقپذیری را محدود میکند و پیچیدگی، وزن و هزینه را افزایش میدهد، زیرا به تعدادی محرک و اجزای سفت و سخت متکی هستند.
با اجازه دادن به تغییر شکل قابل برنامهریزی از طریق الگوهای تاشو و برش، ساختارهایی الهام گرفته شده از اوریگامی و کیریگامی پاسخ میدهند. تطبیقیپذیری آنها محدود است، چون بسیاری از آنها هنوز به موتورهای الکتریکی سفت و سخت برای عملگرها متکی هستند.
برای تسهیل تغییر شکل سریع و چندپایداری، تحولات اخیر در محرکهای بادی از ناپایداریهای کمانش و ضربهای استفاده کردهاند. با حفظ ساختارهای تغییر یافته بدون نیاز به ورودی انرژی پیوسته، این طراحیها مصرف انرژی را کاهش میدهند.
سیستمهای بادی نرم و متاستراکچرهای اوریگامی مدولار یک روش قابل اجرا برای دستیابی به قابلیتهای چندشکلی بدون نیاز به اجزای کنترل سخت و سفت پیشنهاد میدهند، که تطبیقیپذیری روباتیک نرم را برای کاربردهای پیشرفته افزایش میدهد.
حرکت الهام گرفته شده از اوریگامی
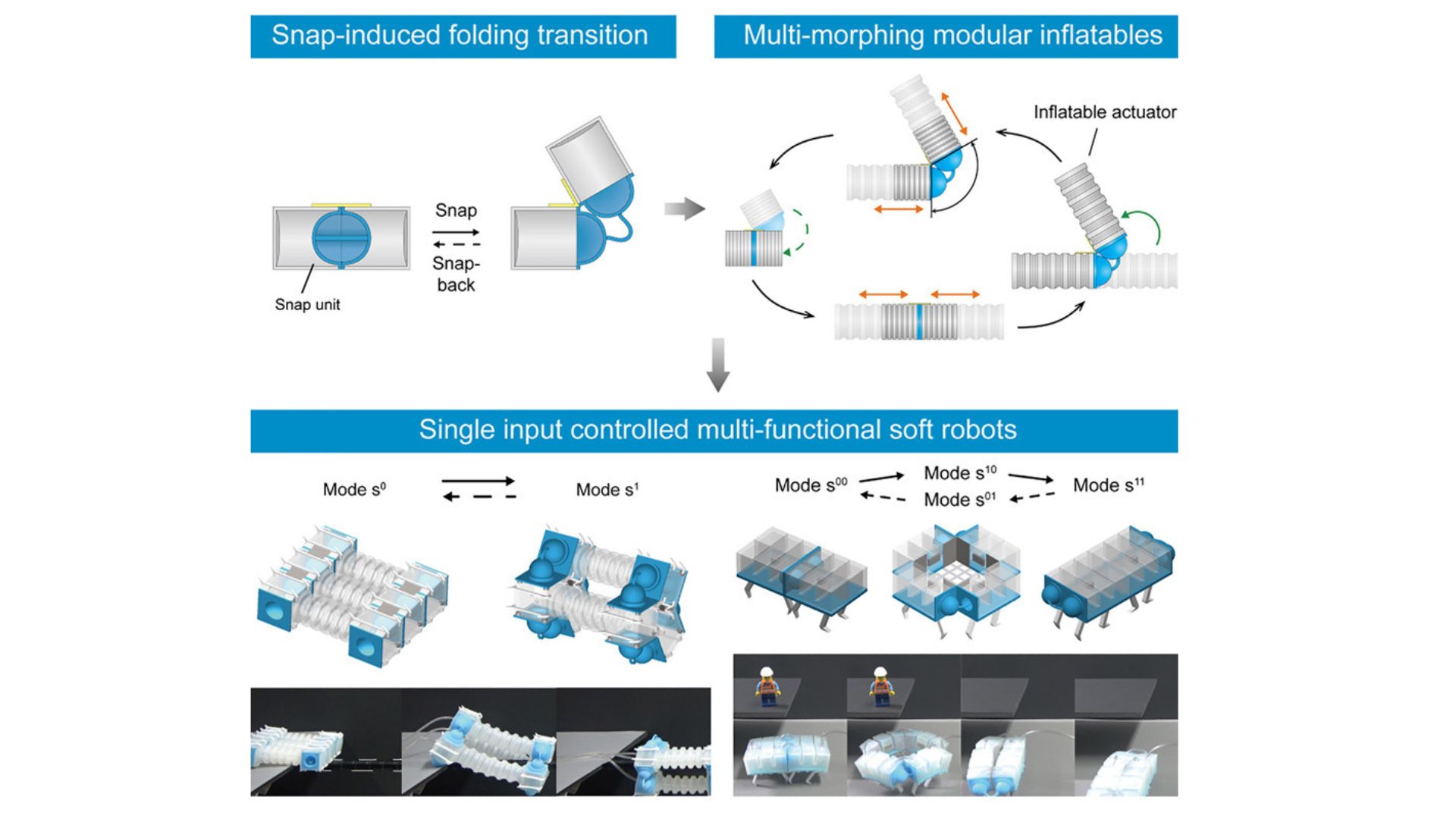
SIMM توسط محققان با استفاده از مفاهیم طراحی الهام گرفته از اوریگامی و کیریگامی ایجاد شده است. این روش از ساختارهای سهبعدی با قدرت هوا برای انجام حرکات برگشتی متعدد با یک ورودی فشار استفاده میکند، در مقابل به اوریگامی سنتی که به تاشو کردن ورقهای نازک متکی است.
وزن، حجم و پیچیدگی کاهش یافتهاست در حالی که کارآیی بهبود یافته است با حذف نیاز به قطعات سخت و غیرقابل انعطاف مانند شیرآلات و ارتباطدهندههای مکانیکی. ساختار ممکن است با استفاده از قرصهای دوپایداری به عنوان لولا ضربهکننده به انواع پیکربندیها تا و بازشود.
محققان نحوه تشخیص زوایای تا شدن و فشار هوای مورد نیاز برای حرکت این قرصها را تحلیل کردند، یافتههای خود را از طریق آزمایشات و شبیهسازیها تأیید کردند. با ترکیب ماژولهای ضربهای مختلف، آنها طراحیهای تطبیقی ایجاد کردند که قادر به عملکردهای مختلف مانند جابجایی در سطوح مختلف و نگهداری اشیاء به روشهای غیرمعمول بودن. این نوآوری روباتیک نرم را ساده میکند و قابلیتهای کاربردی آن را گسترش میدهد.
محققین دو
طراحی رباتی
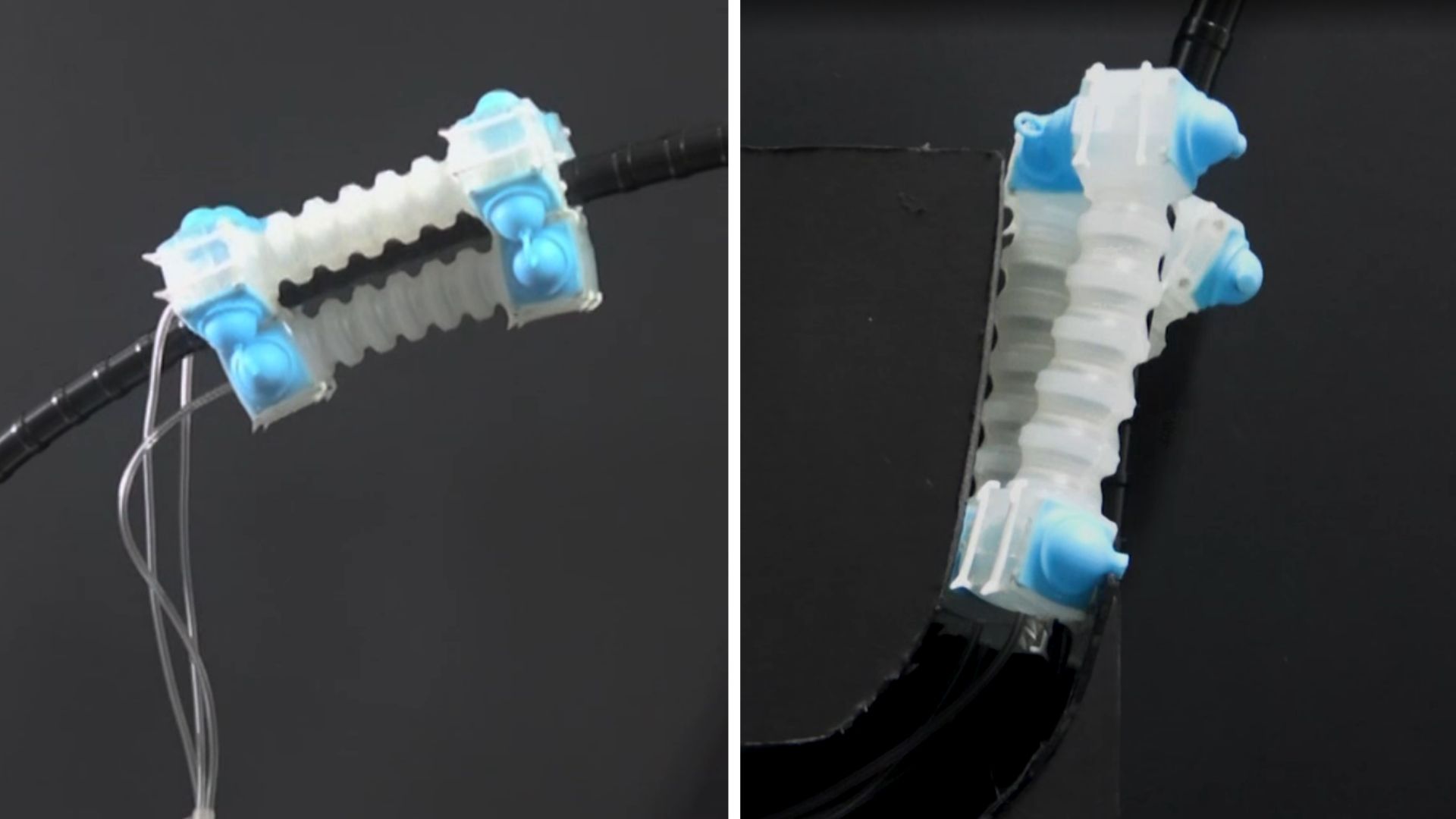
ساختند تا قابلیتهای سیستم را نمایش دهند. یک ربات خزنده و صعود کننده همانند کرم، با انبساط و انقباض میخزد و همچنین کابلها را برای محیطهای چالشبرانگیز میگیرد و صعود میکند.
یک ربات خودپیکربندی شونده خم میشود تا به جلو حرکت کند، سپس به طور ناگهانی به شکل بزرگتری تغییر میکند تا جهت را تغییر دهد و در محیطهای پیچیده ناوبری کند. این توانایی برای تغییر حالتهای حرکت بر حسب تقاضا در روباتیک نرم اولین بار است و انطباق و کنترل بیسابقهای را نشان میدهد.
این فناوری با توانایی خزیدن، صعود و تغییر شکل به فرمهای جدید میتواند به رباتهای نجات که از میان نخالهها حرکت میکنند، رباتهای پزشکی که درون بدن انسان حرکت میکنند، و ساختارهایی که به شکل دلخواه تغییر میکنند، منجر شود که تیم در
بیانیهای
گفت.
جزئیات
پژوهش
تیم در مجله Cell Reports Physical Science منتشر شد.



