
ربات ANYMal دانشگاه ETH زوریخ با پاهای قلابدار سفارشی از پلهها به خوبی بالا میرود
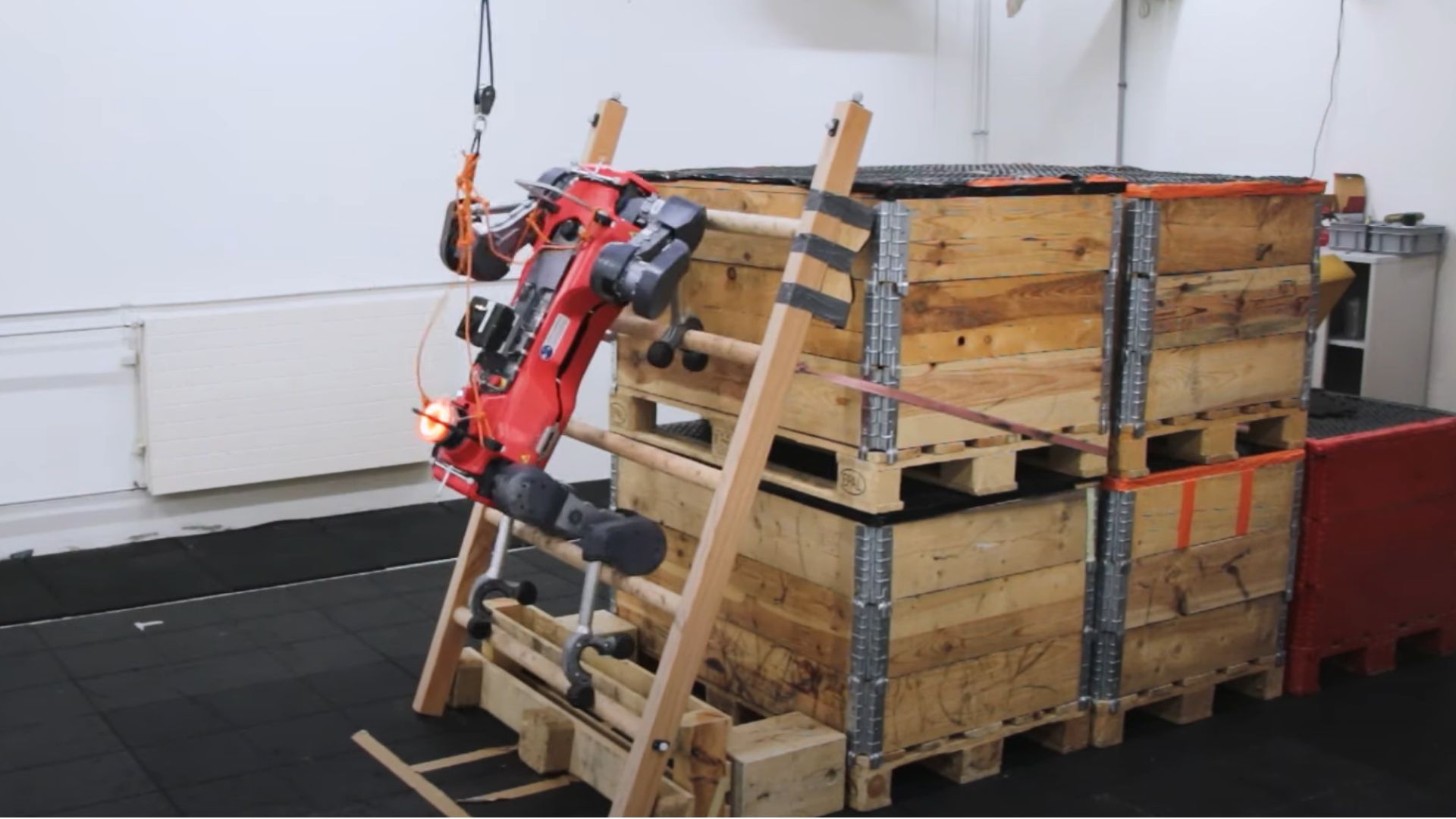
مهندسان آزمایشگاه سیستمهای رباتیک دانشگاه ETH زوریخ ربات چهارپای ANYbotics ANYMal را برای بالا رفتن از پلههای استاندارد به شکل مؤثری اصلاح کردند.
ارتقاء این ربات به بهبود حرکت آن در محیطهای پیچیده کمک کرده و باعث شده که در انجام وظایفی مانند بازرسی و عملیات نجات عملکرد بهتری داشته باشد.
تیم تحقیقاتی با طراحی پاهای خاص مانند قلاب و استفاده از یادگیری تقویتی با شبیهسازی، به ربات ANYMal آموزش داده که چگونه از پلهها بالا برود و مهارتهای خود در این زمینه را بهبود دهد. به این ترتیب، پس از آموزش، ربات در صعود واقعی از پلهها آزموده شد و به موفقیت ۹۰ درصدی دست یافت. این موفقیت به طور قابل توجهای از نسخههای غیر تعدیل شده ربات بهتر بود و اثربخشی طراحی پاهای قلابدار را اثبات کرد.
بالا رفتن پیشرفته از پلهها
رباتهای چهارپا به طور روزافزون در محیطهای صنعتی رایج میشوند. آنها میتوانند سنسورهایی حمل کنند و به عنوان پلتفرمهای مستقل برای بازرسی عمل کنند.
حتی در حالیکه رباتهای پا دار در محیطهای دشوار و ناهموار نسبت به مدلهای چرخ دار برتر هستند، همچنان نمیتوانند به طور مداوم یکی از عناصر رایج زیرساختهای صنعتی را که همان پلهها است، طی کنند.
عدم قابلیت صعود از پلهها باعث محدودیت رباتهای چهارپا در بررسی مناطق خطرناک، به خطر انداختن انسانها و کاهش تولید در مکانهای صنعتی میشود.
پژوهشهای قبلی در زمینه صعود از پلهها عمدتاً بر روی رباتهای انساننما متمرکز بود که سرعت بالای صعود کمی داشتند و تطبیقپذیری محدودی با پیکربندیهای مختلف پلهها داشتند.
مطالعات روی رباتهای چهارپایی نیز با مشکلات مشابهی مواجه شده و تنها توانستهاند به شکل آهسته از پلههای عمودی بالا بروند.جدای از صعود از پلهها، حرکت قوی در رباتهای چهارپایی در محیطهای چالشبرانگیز به روشهای مبتنی بر مدل به دست آمده است، اما اینها حساس به اختلالات هستند.
یادگیری تقویتی (RL) از سوی دیگر، مقاومت واقعی را نشان داده اما هنوز به صعود از پلهها نپرداخته است.
با پژوهش جدید، مهندسان ETH یک چارچوب RL جدید برای صعود پایدار پیشنهاد داده، طراحی قلاب سفارشی برای گرفتن امن ارائه کرده و تستهای گستردهای را انجام داده و سریعترین و کاربردیترین صعود پلهها برای چهارپاها را به دست آوردهاند.
قلاب برای موفقیت
تجربیات گذشته تیم را به این نتیجه رساند که دستها یا پاهای رباتیک برای صعود از پلهها مناسب نیستند، زیرا انسانها به طور طبیعی دستهای خود را به شکل قلاب تشکیل میدهند تا هر پله را بگیرند.
آنها یک پا خاص با مکانیزم قلابمانند طراحی کردند که میتوانست به صورت محکم به پلهها قفل شود تا این مسئله را حل کنند. سپس ربات با استفاده از این قلابها برای صعود آموزش دید.
آنها با استفاده از یک الگوی معلم-دانشآموز برای تقلید از رویدادهای صعود از پلهها به منظور تسریع آموزش کردند. ربات معلم مجهز به دادههای حسی کامل، توانایی صعود در محیطهای مختلفی را کسب کرد و موانع همچون پلههای نازک و پلههای جابجا شده را از سر راه برداشت.
ما در سختافزار، با موفقیت ۹۰ درصدی در زوایای پله از ۷۰ تا ۹۰ درجه، انتقال بدون شات را به نمایش میگذاریم، عملکرد صعودی پایدار در هنگام اختلالات غیر مدلسازی شده و سرعتهای صعودی ۲۳۲ برابر سریعتر از حالت هنری را نشان میدهیم، گفت تیم تحقیقاتی در چکیده مطالعه.
بررسی دقیق در شبیهسازی، حتی با وقفهها، موفقیت ۹۶ درصدی را برای صعود از پلهها نشان داد. به دلیل استحکام که انتهای قلابدار ارائه کرد، ربات توانست پلههای شیبدارتر را بالا برود و با موانع غیرمنتظره مقابله کند.
تحقیق آینده، شامل سایر حسگرها مانند دوربینهای عمیق خواهد شد تا رباتهای چهارپا هر دو بالاو کاهای را انجام دهند. تیم ادعا میکند که طراحی قلاب موجود بهینه نیست و فرصتهای تحقیقاتی جدیدی برای بهبود شکل و کنترل ربات به صورت یکپارچه برای عملکرد بهتر در انواع فعالیتها ایجاد میکند.
جزئیات تحقیق تیم در پایگاه پیشچاپ آرکایو منتشر شده است.



