
روباتهای رقصنده: دانشمندان به روباتهای انساننما حرکات شیرین، تشویق و آغوش یاد میدهند

به منظور تغییر درک عمومی از روباتها، گروهی از مهندسان روبات انساننمایی را آموزش دادهاند تا مجموعهای از حرکات بیانگر را یاد بگیرد و اجرا کند.
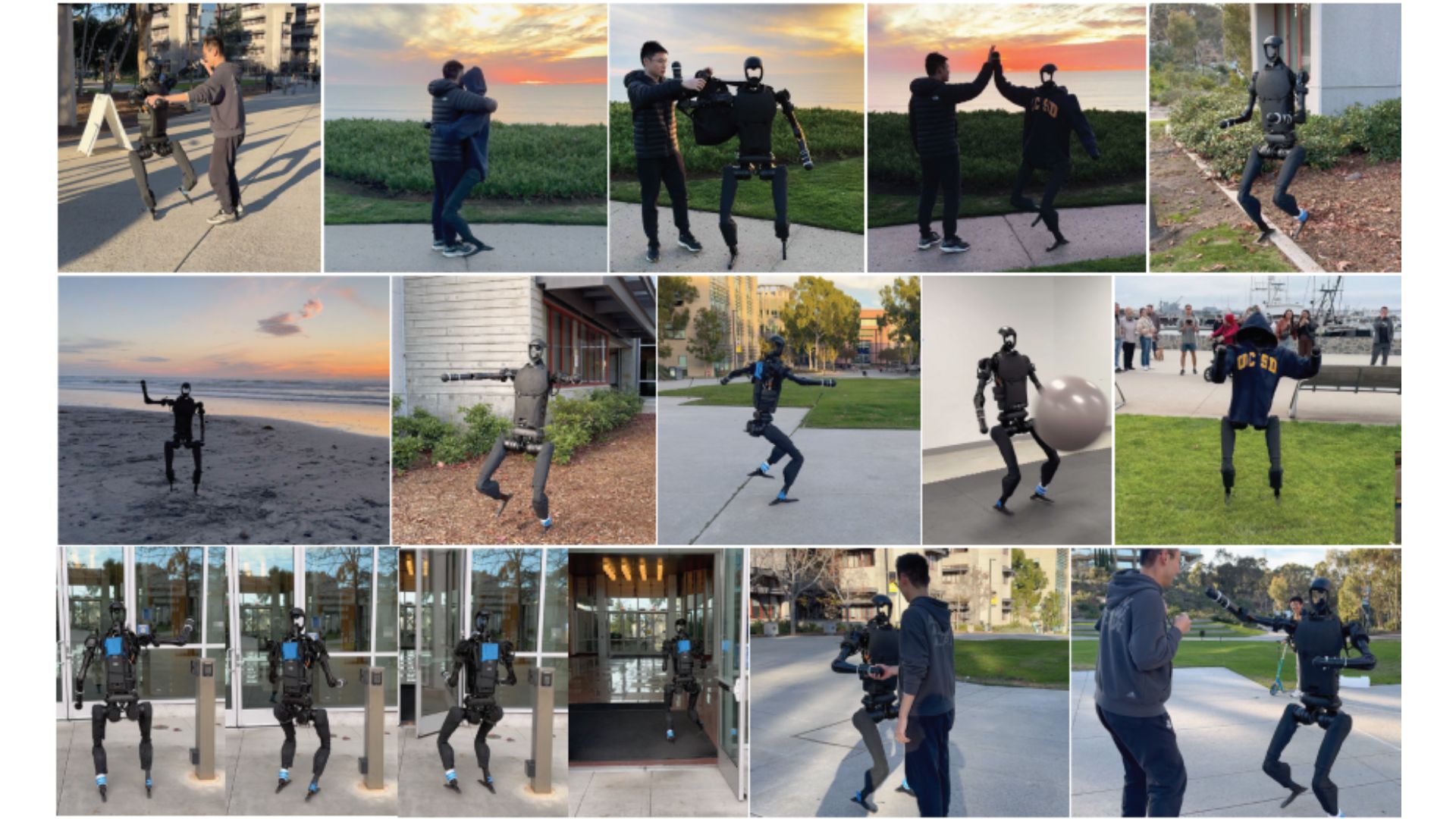
محققان دانشگاه کالیفرنیا، روبات را به گونهای آموزش دادند که بتواند حرکات رقص ساده و حرکات دستی مانند تشویق، دست دادن و آغوش را انجام دهد، در حالی که به صورت ثابت بر روی سطوح مختلف حرکت میکند.
طبق گفته تیم، بیانگری و چابکی افزایشیافته این روبات انساننما راههای جدیدی برای بهبود تعاملات انسان و روبات در محیطهای مختلف باز میکند. اینها شامل خطوط مونتاژ کارخانهها، بیمارستانها و منازل است، جایی که روباتها میتوانند به طور ایمن در کنار انسانها کار کنند یا آنها را در محیطهای خطرناک مانند آزمایشگاهها یا سایتهای حادثهزا جایگزین کنند.
ژیائولانگ وانگ، استاد دانشکده مهندسی جاکوبز دانشگاه کالیفرنیا در سن دیگو، در بیانیهای گفت: “از طریق حرکات بدنی بیانگر و بیشتر شبیه به انسان، ما قصد داریم اعتمادسازی کنیم و پتانسیل همزیستی روباتها و انسانها را نشان دهیم.”
ماژول آموزشی منحصربهفرد
هدف این مطالعه این بود که روباتهای انساننما بتوانند حرکات غنی، متنوع و بیانگری را در دنیای واقعی تولید کنند. پیشنهاد این است که روبات اندازه انسان به گونهای آموزش داده شود که حرکات انسان را بهطور واقعی تقلید کند.
برای آموزش این روبات، محققان از دادههای بزرگ ضبط حرکت انسان در یک فریمورک یادگیری تقویتی استفاده میکنند. با این حال، اعمال مستقیم این دادهها به روبات به دلیل تفاوتهای در تواناییهای حرکت، کار نمیکند.
تیم ExBody (کنترل بدن بیانگر) این مشکل را حل کرده و روبات بالاتنهاش را طوری میکند که حرکات انسان را تقلید کند در حالی که پاهایش فقط سرعت داده شده را دنبال میکند.
طبق گفته محققان، بیانگری روبات انساننما از آموزش در طیف گستردهای از حرکات بدن انسان ناشی میشود که به آن اجازه میدهد حرکات جدید را بهراحتی تقلید و تعمیم دهد. مانند یک دانشجوی رقص سریع یادگیری، روبات به سرعت روتینهای جدید و ژستها را یاد میگیرد.
تیم روبات را با استفاده از مجموعه گستردهای از دادههای ضبط حرکت و ویدئوهای رقص آموزش داده است. تکنیک منحصر بهفرد آنها بالاتنه و پایینتنه روبات را جداگانه آموزش داده است.
به گفته تیم، بالاتنه روبات برای بازتولید حرکات مرجع مختلف مانند رقص و دست دادن آموزش دیده در حالی که پاهایش روی حفظ تعادل و حرکت بر روی سطوح مختلف با گامهای ثابت تمرکز کردهاند.
وانگ گفت: “هدف اصلی اینجا نشان دادن توانایی روبات برای انجام کارهای مختلف در حالی که از مکانی به مکان دیگر راه میرود بدون سقوط است.”
قابلیتهای ارتقا یافته روباتیک
تمام ساختار روبات تحت یک سیاست واحد قرار دارد، حتی اگر بالاتنه و پایینتنهاش جداگانه آموزش دیده باشند. سیاست هماهنگ تضمین میکند که روبات بتواند به طور ثابت روی سطوحی مثل چمن، سنگریزه، خاک، چیپس چوب و جادههای شیبدار بتن راه برود، در حالی که به آن اجازه میدهد حرکات بالاتنه پیچیدهتری را انجام دهد.
یک روبات انساننمای مجازی برای شبیهسازیها استفاده شد قبل از اینکه به یک روبات واقعی منتقل شود. روبات نشان داد که میتواند هم حرکات جدید و هم آموزش دیده را در تنظیمات عملی انجام دهد.
در حال حاضر، یک کنترلر بازی که توسط یک اپراتور انسانی استفاده میشود، سرعت، جهت و برخی حرکات روبات را کنترل میکند. در آینده، تیم قصد دارد به مدل بعدی روبات دوربینی اضافه کند تا بتواند بهطور مستقل و ناوبری محیطهای مختلف عمل کند.
آنها همچنین در حال تمرکز روی بهینهسازی طراحی روبات برای انجام وظایف پیچیدهتر و دقیقتر هستند. وانگ گفت: “با گسترش قابلیتهای بالاتنه، میتوانیم دامنه حرکات و ژستهایی که روبات میتواند انجام دهد را افزایش دهیم.”
طبق چکیده مطالعه، تیم معتقد است روش آنها راه را برای توسعه روباتهای انساننمای قابل اعتماد و چندمنظوره که قادر به انجام وظایف متعدد بهطور موثر هستند، هموار میکند.



