
روباتهای نرم با لاستیک هایپرالاستیک تقلید از مشت میگوی آخوندی و پرش کک مانند

تیمی از محققان مکانیزم “معکوس گشتاور هایپرالاستیک” (HeTRM) را با الهام از اصول طبیعی توسعه دادهاند که به روباتهای ساخته شده از مواد لاستیکمانند اجازه میدهد حرکات سریع و قدرتمندی انجام دهند.
با استفاده از خاصیت هایپرالاستیسیته، تیمی از دانشگاه ملی سئول یک مکانیزم معکوس گشتاور در یک مفصل نرم ایجاد کرده است که با استفاده از یک تاندون درونی حرکتهای تکراری شبیه به سیلیا را تولید میکند.
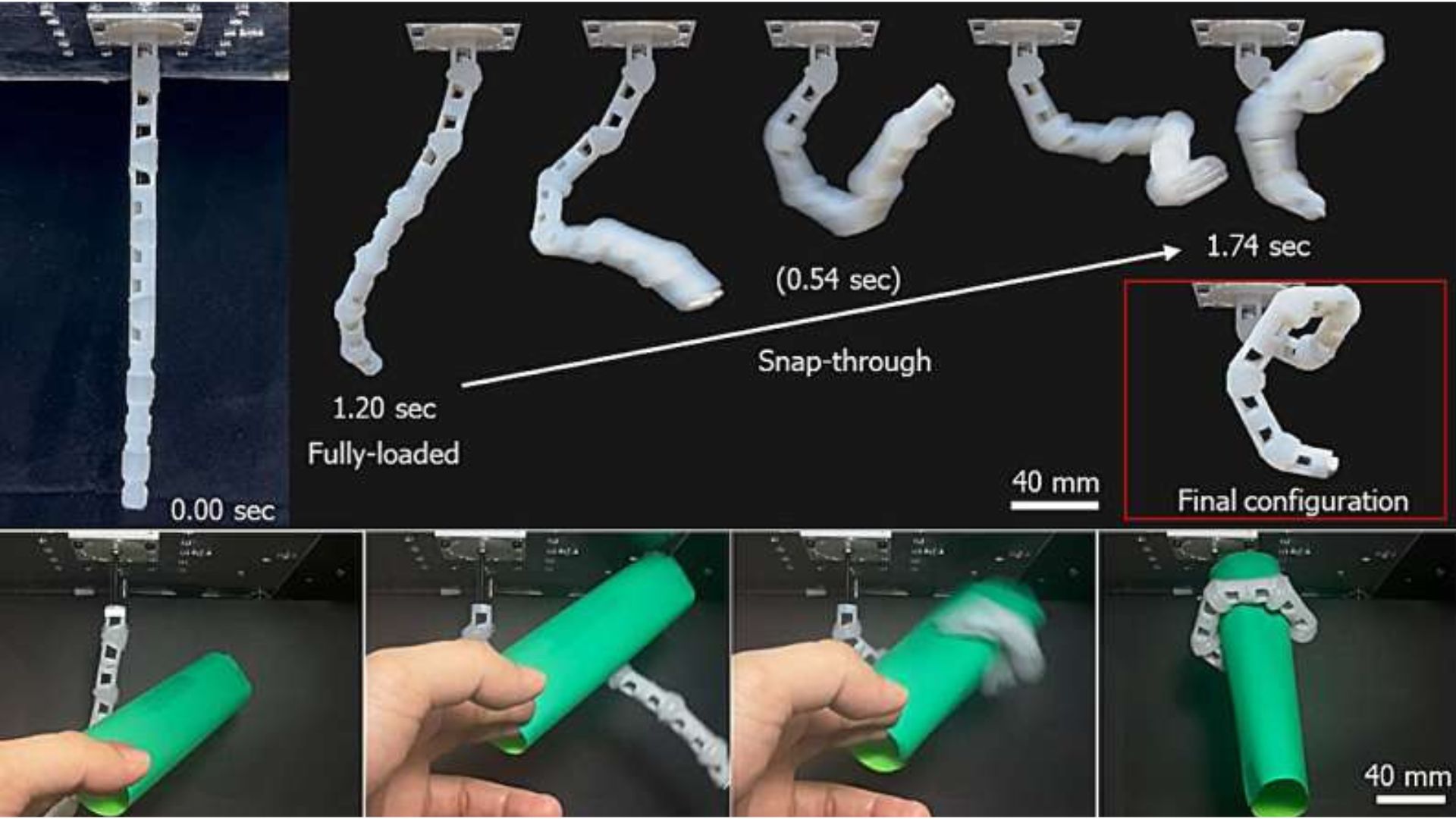
این مکانیزم HeTRM نشان میدهد که چگونه با اعمال فشار خاص، یک تغییر سریع بین دو حالت ایجاد میشود.
به گفته محققان، این پیشرفت عملکرد روباتهای نرم را بهبود بخشیده و حرکات کارآمدتر و پویاتری را ممکن میسازد.
نوآوری در معکوس گشتاور
«پذیرفتن فوری» زمانی است که یک سیستم به سرعت از یک حالت پایدار به حالت دیگری میرود و این ویژگی در دستگاههای نرم که یک محرک را به حرکات قدرتمند تبدیل میکنند، مفید است. این اغلب با ساختارهای دوپایدارت بهدست میآید.
در طبیعت، مکانیزمهای معکوس گشتاور با استفاده از نیروهای عضلانی بهکار میروند و ممکن است مزایای بالقوهای داشته باشند. با این حال، نسخههای مصنوعی کنونی این مکانیزمها پیچیده هستند و به مکانیک پیشرفته حرکتی وابستهاند و گزینههای طراحی را برای مفاصل و دستگاههای نرم محدود میکنند.
به گفته محققان، میگوی آخوندی با سرعتی تا 55.6 مایل در ساعت (90 کیلومتر/ساعت) به هدف خود حمله میکند و کک بیش از 200 برابر طول بدن خود پرش میکند. توانایی این موجودات برای ایجاد نیروهای قدرتمند با بدنهای نرم خود به مکانیزم “معکوس گشتاور” نسبت داده میشود که اجازه میدهد جهت نیروی چرخشی اعمال شده توسط عضلات بر روی اندامهایشان به سرعت تغییر کند. این مکانیزم کلید قدرتهای فیزیکی شگفتانگیز آنهاست.
دکتر کیو-جین چو، استاد بخش مهندسی مکانیک در دانشگاه ملی سئول، در بیانیهای گفت: “تیم تحقیقاتی ما قبلاً روباتهایی با الهام از ککها توسعه داده است که توانستهاند پرشهای بلند را هم در زمین و هم در آب انجام دهند و این مطالعه جدید بهویژه مهم است چرا که یک پیشرفت است که عملکرد قدرتمند را در ساختارهای نرم و مانند لاستیک فراهم میکند.”
نوآوری روباتهای نرم
تیم تحقیقاتی ادعا میکند که ایده بنیادی پشت مکانیزم معکوس گشتاور هایپرالاستیک ایجاد شده این است که از خواص مواد هایپرالاستیک نرم که به سرعت در هنگام فشردهسازی سخت میشوند بهرهبرداری کنند.
آنها کشف کردند که یک مفصل انعطافپذیر به یک نقطهی بحرانی میرسد که انرژی ذخیره شده را بهطور فوری منتشر میکند وقتی که فشار در یک طرف مفصل اعمال شود. آنها توضیح دادند که مانند سیلیا در طبیعت، حرکتهای خمشی تکراری و قوی حتی با ساختار سادهای که یک تاندون و موتور را به یک مفصل انعطافپذیر متصل کند نیز میتواند بهدست آید.
وویونگ چوی (در حال حاضر در نوار لبس) و وونگبی کیم (در حال حاضر در موسسه علم و تکنولوژی کره)، که نویسندگان مشترک تحقیق هستند، در بیانیهای گفتند: “پیچیدن فوری دستبندهای ضربهای توسط یک انتقال فوری بین دو حالت پایدار، معروف به پذیرش انجام میشود. در حال حاضر بسیاری از تلاشها برای تقلید از این رفتار انجام شده است، اما ما یک رویکرد جدید با استفاده از خواص مواد بهجای طراحیهای ساختاری معرفی کردیم.”



