
روبات 15 میلیمتری چین رکورد سرعت جدیدی را ثبت کرد و سوسکهای واقعی را پشت سر گذاشت

محققان چینی روبات کوچکی به نام BHMbot-B ساختهاند که 15 میلیمتر طول دارد و با حرکات سریع به جلو و عقب، برای حرکت در مکانهای کوچک ایدهآل است.
این روبات به طور مؤثر بین حرکات جلو و عقب سوئیچ میکند با هماهنگ کردن حرکات لرزشی مغناطیس، تیرک و لینکها با استفاده از کنترل گذار حالت ارتعاشی.
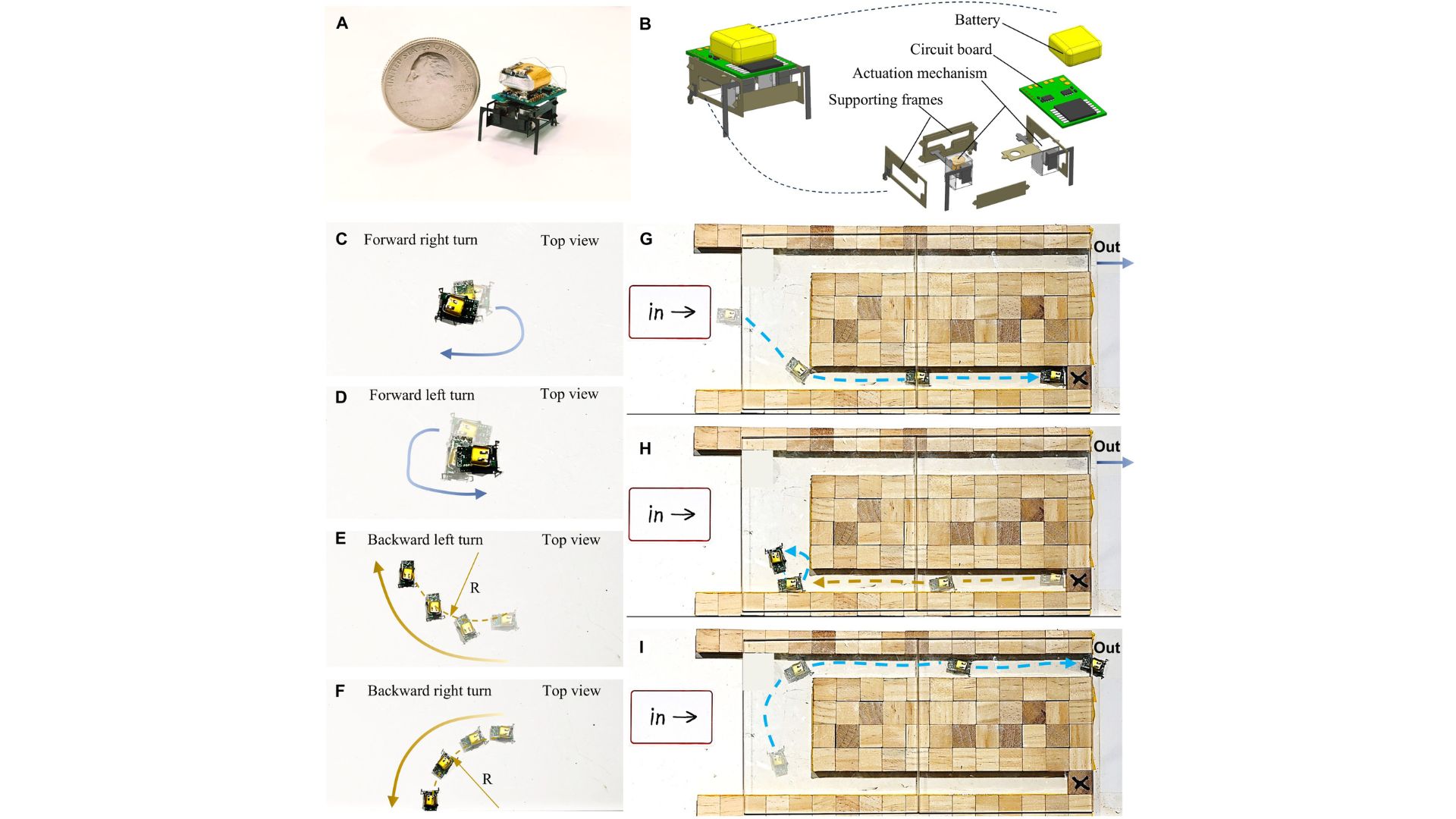
تیم دانشگاه بینهانگ ادعا میکند که این دستگاه باتری، مدار کنترلی برای عملیات بیسیم، و دو محرک الکترومغناطیسی برای ظرفیت حمل بار بالا را ترکیب میکند.
طبق گفته محققان، با سرعتهای جلو و عقب به ترتیب 18.0 طول بدن بر ثانیه (360 میلیمتر بر ثانیه) و 16.9 BL/s (338 میلیمتر بر ثانیه)، BHMbot-B توانایی حرکت در محیطهای چالشبرانگیز را با دقت و چابکی نشان میدهد.
حرکت پیشرفته
ماشینهای بزرگ برای وظایفی مانند بازرسی یا رفع گرفتگی در فضاهای محدود مشکل دارند، و خطر آسیب ساختاری وجود دارد. میکروروباتها به عنوان یک حل ارائه شدهاند، سرعتهای سریع و چرخش دقیق را فراهم میکنند.
با این حال، در تونلهای تنگ جایی که چرخش ممکن نیست، اگر به بنبست برخورد کنند، با چالشهایی روبرو میشوند. بر خلاف حشرات که به طور غریزی در مواجهه با موانع عقبنشینی میکنند، اکثر میکروروباتها فاقد توانایی حرکت به عقب به طور موثر هستند، که مهارت حیاتی برای حرکت در محیطهای باریک و ناشناخته است.
طراحیهای قبلی، مانند روبات HAMR، حرکت جلو و عقب را با استفاده از چندین محرک نشان دادهاند، اما چنین سیستمهایی پیچیده و دشوار برای کوچکسازی برای عملیات بدون سیم هستند.
به گفته محققان، حرکت به عقب میتواند با تنظیم دستی ساختارهای میکروروباتها، مانند شیب دادن پاها یا چرخاندن بدن، فعال شود. با این حال، کنترل از راه دور عملی نیست. یکی از بزرگترین چالشها همچنان یافتن راهحلهای فشرده و موثر برای تغییر جهت در زمان واقعی است.
مطالعه کنونی BHMbot-B، یک میکروروبات BHMbot ارتقایافته، را معرفی میکند که با استفاده از ارتعاش با کنترل فرکانس به جلو و عقب حرکت میکند.
حامل بار تطبیقی
حشرات به طور غریزی در مواجهه با موانع در فضاهای تنگ عقبنشینی میکنند، رفتاری که توسط BHMbot-B تقلید میشود، که طراحی شده است که بدون چرخش به جلو و عقب حرکت کند.
روبات فشرده
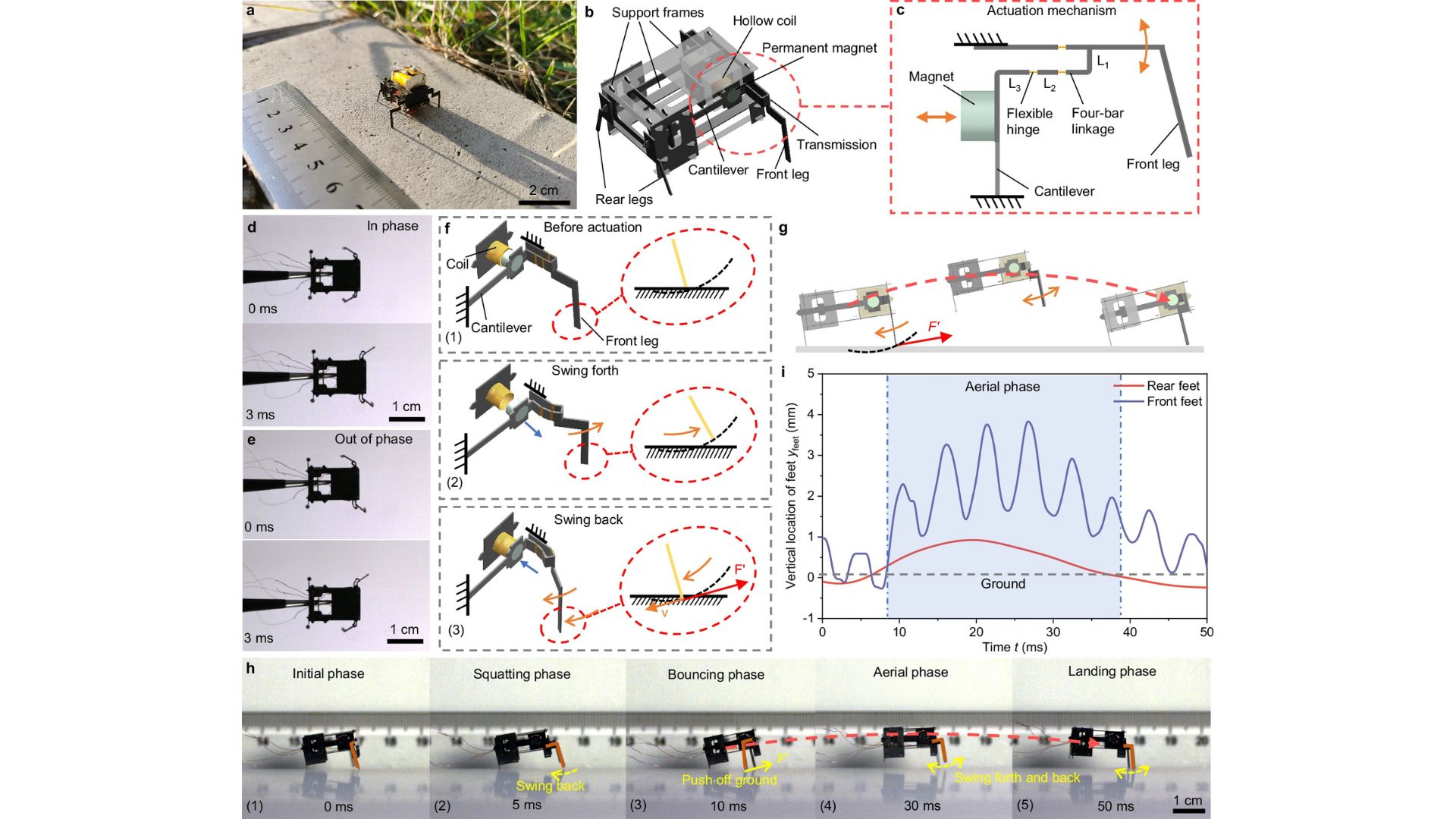
با استفاده از یک محرک الکترومغناطیسی، تیرک و سیستم لینک چهارمی عمل میکند. تیرک زمانی حرکت میکند که جریان متناوب به سیمپیچ اعمال شود، که باعث نوسان مغناطیس میشود. روبات میتواند با حرکت دادن پاهای جلویی خود در جهات مختلف به جلو یا عقب حرکت کند، در حالی که حرکت بین حالتهای ارتعاشی مرتبه اول و دوم تغییر میکند.
هنگامی که
مغناطیس و تیرک در یک جهت حرکت میکنند، نیروی اصطکاک رو به جلو ایجاد میشود زیرا پاهای جلویی به زمین برخورد میکنند، باعث حرکت به جلو میشوند. برعکس، در حالت دوم، مغناطیس و تیرک در جهت مخالف حرکت میکنند، باعث میشود پاهای جلویی به طور موقت از وضعیت تعادلی خود فراتر روند و اصطکاک معکوس ایجاد کنند.
به گفته محققان، تحلیل دوربین با سرعت بالا گامهای متمایز را برای هر دو حرکت تایید میکند، که سینماتیک دقیق را نشان میدهد. طراحی به بازیابی کارآمد از بنبستها در محیطهای محدود امکان میدهد.
با تنظیم سرعت در نزدیکی فرکانسهای رزونانس تیرک، میکروروبات BHMbot-B به سرعتهای دویدن چشمگیری از 38.7 BL/s به جلو با 163 هرتز و 44 BL/s به عقب با 680 هرتز دست مییابد. به دلیل تماس کارآمد پاهای جلویی با زمین در حین حرکت، سرعتهای به عقب بالاتر از سرعتهای جلو است.
تیم تاکید میکند که پاهای عقب روبات با غلتکهای کوچک طراحی شدهاند تا اصطکاک را به حداقل برسانند و توانایی حمل بار را برای عملیات بدون سیم افزایش دهند. این میتواند بارهایی تا 32 برابر وزن خود را، از جمله یک ستون فلزی 5.18 گرمی، حمل کند در حالی که سرعت 3.2 BL/s را حفظ میکند و بیش از پنج برابر وزن بدن خود را پشتیبانی میکند. به دلیل طراحیاش، BHMbot-B به عنوان یک میکروروبات برتر برای چابکی و کارآیی حمل بار در مکانهای محدود قرار میگیرد.
میکروروبات BHMbot-B سازگاری خود را در سطوحی مانند شیشه، شن و لولههای خمیده نشان میدهد. بدون سیم به جلو و عقب حرکت میکند، بارهایی مانند باتری، ژیروسکوپ یا دوربین میکرو را حمل میکند. اینها انتقال داده و تصویربرداری در زمان واقعی در فضاهای محدود را ممکن میسازند.
به گفته تیم، تحقیقات آینده بر افزودن حسگرهای محیطی و ناوبری خودکار، بهبود بهرهوری آن در محیطهای چالشبرانگیز متمرکز خواهد بود.
جزئیات تحقیقات تیم در ژورنال Science Advances منتشر شده است.



