
مغز مصنوعی بیسیم امکان شناوری روان را برای ربات زیستهیبریدی فراهم میسازد
محققان یک ربات زیستهیبریدی با مغز مصنوعی توسعه دادهاند که قابلیت کنترل بیسیم دقیق و هدایت را دارد.
توانایی ربات به شکل پروانه برای ایجاد فلپ کردن بالهای چپ یا راست و تنظیم سرعت حرکت میتواند با تحریک نورونهای خاصی حاصل شود.
رباتها به سرعت متوسط 0.52 ± 0.22 میلیمتر بر ثانیه، فرکانس فلپ کردن بالها تا 2.0 هرتز و انحنای چرخش 0.11 ± 0.04 رادیان به ازای هر میلیمتر رسیدند.
محققان بیان کردند که این یافتهها میتواند به توسعه دستگاههای زیستهیبریدی خودمختار آینده کمک کند که میتوانند با توجه به نشانههای محیطی با استفاده از سیستمهای عصبی یکپارچه واکنش نشان دهند – ویژگیای که بسیاری از سیستمهای زیستهیبریدی فعلی فاقد آن هستند.
کنترل بیسیم عضلات
ارگانیسمهای زنده به گونهای تکامل یافتهاند که الگوهای حرکتی پیچیده و سیستمهای کارآمدی را توسعه دهند که به آنها اجازه میدهد با محیطهای متغیر تعامل کنند. این الهام طبیعی منجر به تلاشهای علمی برای ساخت ماشینهای زیستهیبریدی شده است که در آنها از عضلات قلبی یا اسکلتی استفاده میشود.
این ماشینها میتوانند حرکات شبهزندگی مانند شنا، راه رفتن و گرفتن را تقلید کنند و رفتارهایی مانند سکته زدن عروس دریایی یا پمپاژ قلب را بازسازی کنند. با وجود پیشرفتهایشان، بیشتر رباتهای زیستهیبریدی به دلیل فقدان سیستم عصبی نمیتوانند در زمان واقعی با محیط خود تطبیق یابند.
پیشرفتهای اخیر نشان داده است که میتوان یک شناگر زیستهیبریدی را با استفاده از نورونهای حرکتی و عضلات ساخت، اما کنترل حرکات آن همچنان چالشبرانگیز است. محققان تأکید دارند که اضافه کردن سیناپسهای الکتریکی بیسیم به این ماشینها میتواند کنترل عضلات و پاسخگویی را بهبود بخشد.
به گفته تیم، رویکرد جدید با هدف فعال کردن بافتهای عضلانی به صورت گزینشی و بهبود انتقال سیگنال انجام میشود و منجر به رباتهای زیستهیبریدی پیشرفتهتر و قابلکنترلتر برای کاربردهای بیومدیکال و رباتیک نرم میشود.
در این مطالعه، محققان نمایانگر یکپارچهسازی سیناپسهای الکتریکی بین نورونهای حرکتی مشتقشده از iPSC و کاردیومیوسیتها در یک ربات زیستهیبریدی هستند. به جای سیناپسهای شیمیایی، این اتصالات الکتریکی امکان ارتباط سریعتر و دوطرفه بین سلولها را فراهم میکنند.
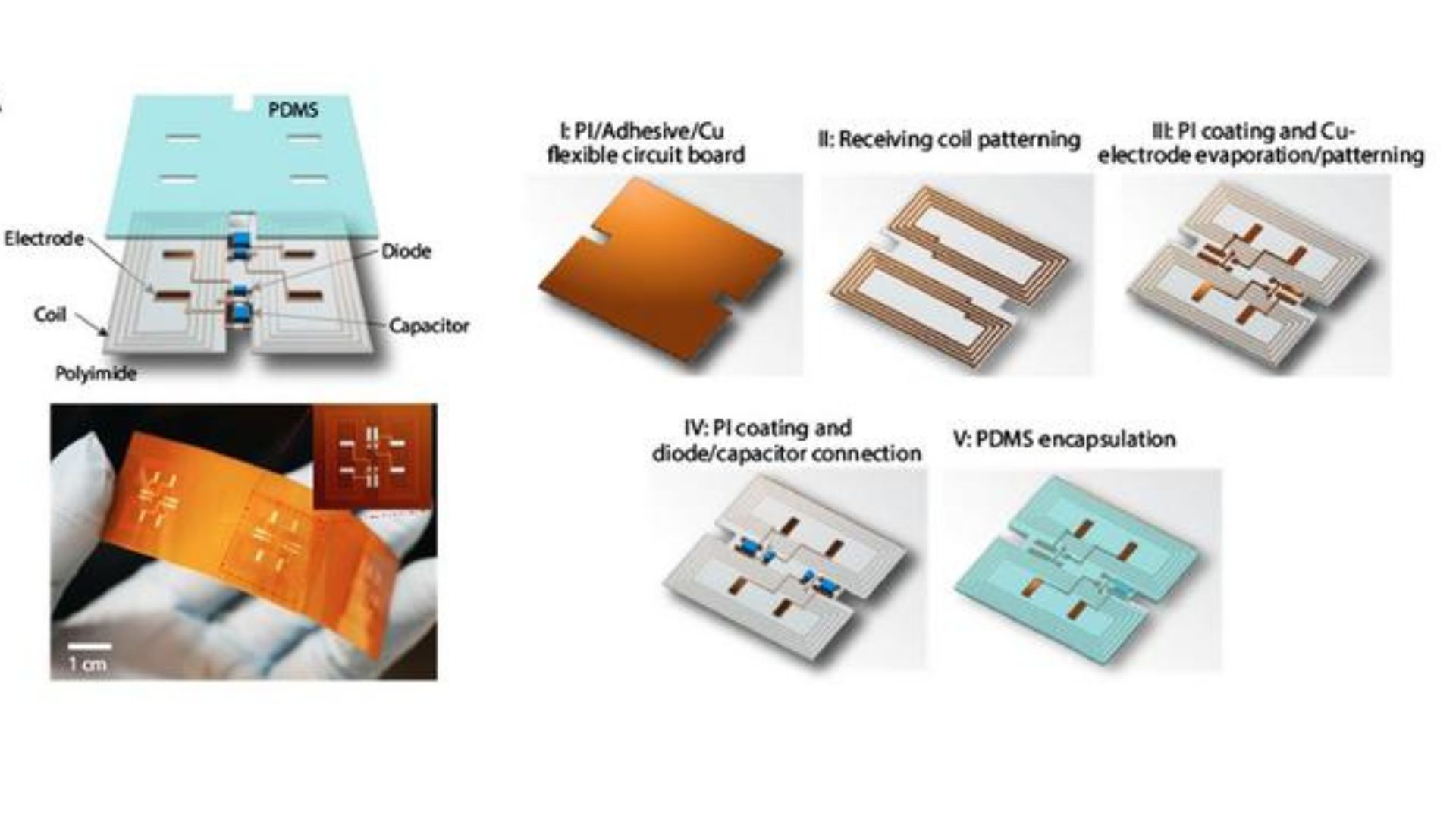
با استفاده از بایوالکترونیکهای بیسیم با چندگانهسازی فرکانسی، مغز مصنوعی ربات به صورت گزینشی نورونها را برای کنترل حرکات بالها فعال میکند. سیستم بیسیم سیگنالهایی ارسال میکند تا بافتهای عضلانی خاصی را تحریک کند و کنترل مستقل سرعت و جهت ربات را با تنظیم بالهای چپ و راست آن امکانپذیر میسازد.
سیناپسهای الکتریکی سریع
تیم تحقیقاتی دستگاه خود را با کشت مشترک نورونهای حرکتی (MNs) و کاردیومیوسیتها (CMs) که از سلولهای بنیادی پرتوان انسانی تولید شدهاند، در یک دستگاه میکروسیالی توسعه داد.
در نتیجه، MNها توانستند به سمت CMs حرکت کرده و اتصالات نورویقلبی را تشکیل دهند. مهم است که این اتصالات دارای کانالهای پیوندگاهی بودند که سیناپسهای الکتریکی را به جای سیناپسهای شیمیایی ایجاد کرده و انتقال دوطرفه سریعتری بین سلولها را ممکن میساختند.
سپس محققان این دولایه بافتی را در یک اسکلت انعطافپذیر با بالهای هیدروژلی شکل پروانه و قطعات الکترونیکی برای ارتباط بیسیم با ربات قرار دادند.
تیم تحقیقاتی توانست سیگنالهایی با فرکانسهای مختلف ایجاد کند تا در سمت چپ یا راست دستگاه بایوالکترونیکی ایجاد جریان کند، با استفاده از یک سیستم بیسیم چندگانهسازی فرکانسی. از طریق سیناپسهای الکتریکی، سیگنالهای مغز مصنوعی انقباضات عضلات قلب را با فعال کردن نورونهای حرکتی در هر دو طرف ایجاد کردند.
محققان بیان کردند که تستها نشان دادند که ربات قادر به شنا کردن با فلپ کردن بالهای خود در الگوهای متناوب یا همزمان است. تیم در یک بیانیه گفتند: «فعالسازی هدفمند نورونهای حرکتی در بال چپ یا راست به ربات اجازه داد تا در زوایای دقیق و با سرعتهای مختلف بچرخد.»
نیکول شو، نویسنده اصلی از دانشگاه کلورادو بولدر، بیان کرد: «ظهور این شناگر رباتیک نوروموسکولار نشاندهنده یک مرز بالقوه برای ساخت سیستمهای رباتیک زیستهیبریدی خودمختار است که میتوانند کنترل حرکتی تطبیقی، حسگری و یادگیری را انجام دهند.»
جزئیات تحقیقات تیم در مجله Science Robotics منتشر شده است.



