
مهندسان اولین رباتها با توانایی انجام فعالیتهای پیچیده بدون برق را ساختند

مهندسان روشی پیشرفته برای انتقال دستورهای پیچیده به رباتها بدون استفاده از برق توسعه دادهاند. این میتواند فضای پردازشی بیشتری در سیستم ربات برای عملکردهای پیشرفته آزاد کند. محققان دانشگاه کینگز کالج لندن (KCL) نوع جدیدی از مدار کوچک ابداع کردهاند که از طریق تغییرات فشار مایع ارتباط برقرار میکند و از عملکرد بدن انسان الهام گرفته است.
این روش به رباتها امکان میدهد وظایف را مستقل از سیستمهای الکتریکی متداول انجام دهند و با استفاده از یک مایع داخل مدار دستورهای مختلفی منتقل میشود.
به گفته تیم تحقیقاتی، این اولین بار در جهان است که امکان نسل جدیدی از رباتها را فراهم میکند که بدن آنها میتواند به طور مستقل از مرکز کنترل داخلی عمل کند و این فضا به جای آن میتواند برای نرمافزارهای پیچیده مبتنی بر هوش مصنوعی استفاده شود.
نوآوری سوپاپ نرم
رباتهای نرم که به خاطر انعطافپذیری و ایمنی خود شناخته میشوند، در کاربردهای مختلف مانند دستگاههای پوشیدنی و بازوهای مکانیکی کاربرد یافتهاند. معمولاً این رباتها توسط سیستمهای سنتی مانند سوپاپهای الکترومغناطیسی، رگولاتورها و پمپها کنترل میشوند که امکان حرکت و کوچکسازی محدود شده است.
برای حل این مشکل، دانشمندان به دنبال طراحیهای جدید برای سوپاپها و پمپهای نرم هستند که میتواند در بدنه رباتها ادغام شود، کارایی را افزایش دهد و امکان استفاده در محیطهای دشوار را فراهم کند. این سوپاپهای نرم که جریان مایع را با خم کردن لولهها کنترل میکنند، نیاز به ورودیهای کنترلی زیادی ندارند.
برخی طرحها میتوانند حالتهای قبلی را به یاد آورند یا فراموش کنند و برخی دیگر میتوانند نوسانگرهایی ایجاد کنند که مانند ساعت عمل کنند و به رباتها امکان انجام وظایفی مانند شنا و صعود را بدهد. با این حال، برخی رویکردها همچنان نیاز به بسیاری از سوپاپها و تنظیم فشار اضافی برای دقیقسازی عملکرد دارند.
«نرمافزار به سرعت در سالهای اخیر پیشرفت کرده است، اما سختافزار همگام نبوده است. با ایجاد سیستمی سختافزاری که مستقل از نرمافزار اجرایی است، میتوانیم بار پردازشی زیادی را بر روی سختافزار منتقل کنیم، به همان شیوه که مغز شما نیازی ندارد به قلبتان بگوید که ضربان بزند،» میگوید آنتونیو فورته، استاد ارشد مهندسی در کینگز کالج لندن و نویسنده اصلی این مطالعه، در بیانیهای.
کنترل مبتنی بر فشار
رباتها اکنون کاملاً به برق و تراشههای کامپیوتری وابسته هستند. یک
«مغز» رباتی
متشکل از الگوریتمها و نرمافزار، فرمانها را به بدن ربات از طریق انکودرها ترجمه میکند که سپس به اجرای عمل میپردازند.
در رباتیک نرم، جایی که دستگاههایی مانند عضلان رباتی از مواد انعطافپذیر ساخته شدهاند، این وابستگی به اجزای سخت الکترونیکی مشکلاتی ایجاد میکند. وظایف پیچیده، مانند گرفتن دسته در، فشار اضافی بر روی نرمافزار وارد میکند، زیرا مواد نرم نیاز به کدگذاری پیچیدهای دارند.
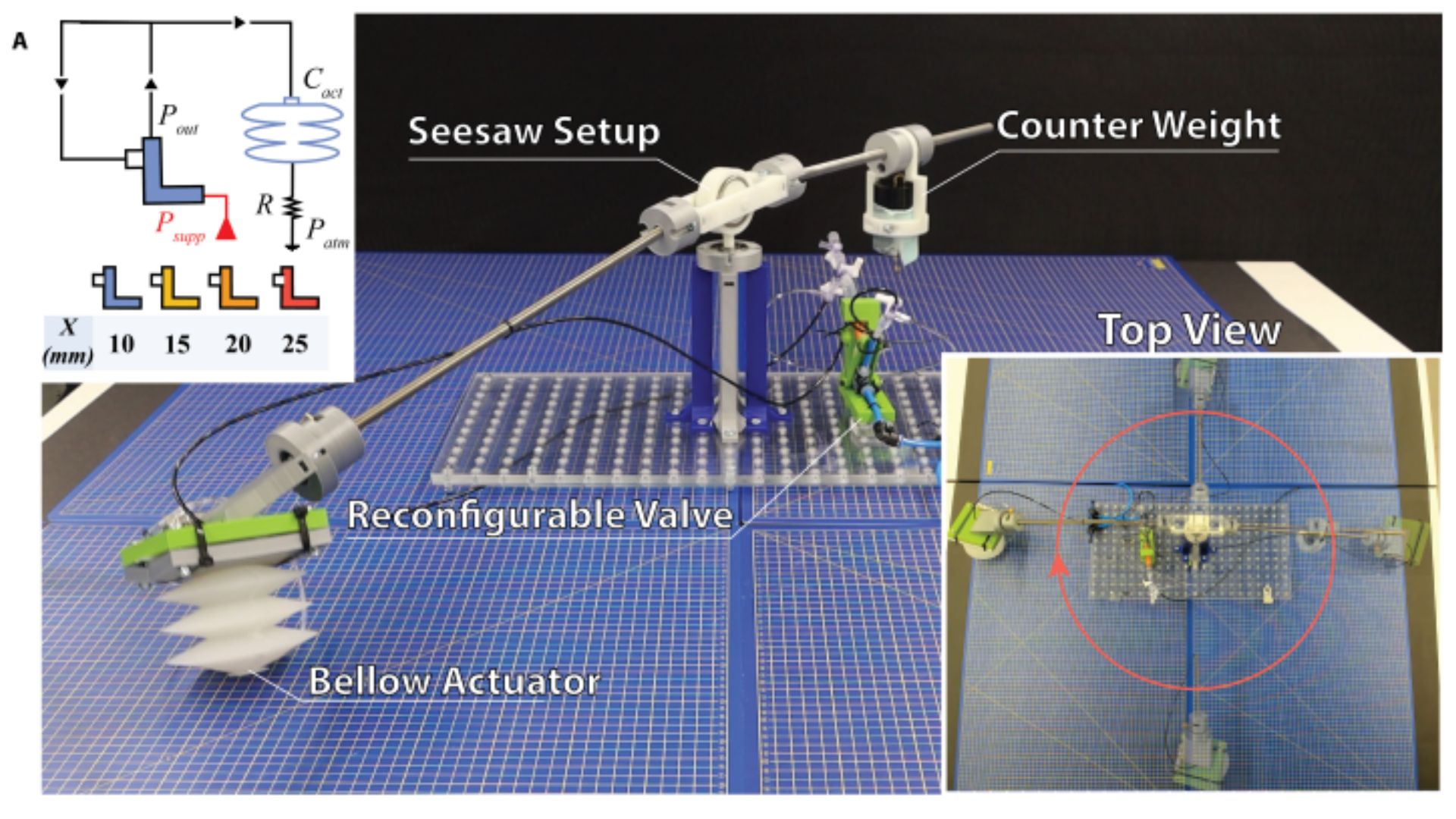
برای حل این مشکل، دانشمندان یک مدار قابل برگشت ایجاد کردهاند که شامل یک سوپاپ قابل تنظیم در سختافزار ربات است. این سوپاپ از سیگنالهای فشار، که شبیه به کد باینری هستند، برای کنترل حرکات استفاده میکند، مشابه یک ترانزیستور در مدارهای متداول.
به همین دلیل، رباتها میتوانند حرکات پیچیده را بدون استفاده از برق یا سیستم کنترل مرکزی انجام دهند. در مقایسه با مدارهای مایعمحور کنونی، روش مبتنی بر فشار امکانات و کنترل بیشتری فراهم میکند.
مدار جدید کنترل را از نرمافزار به سختافزار انتقال میدهد، بار پردازشی را کاهش میدهد و راه را برای سیستمهای رباتیک قدرتمند و قابل تطبیقتر در آینده هموار میکند.
تیم تاکید دارد که طراحی میتواند سبب شود رباتها در مکانهایی که
برق
ویرایشپذیر نیست، مانند مناطق در معرض تشعشع مانند چرنوبیل یا فضاهای حساس الکتریکی مانند اتاقهای MRI عمل کنند. این رباتها همچنین برای مناطق با درآمد کم با دسترسی متناوب به برق طراحی شدهاند.
هدف فعلی تیم این است که اختراع خود را برای استفادههای گستردهتر توسعه دهند و این مدارها را در سیستمهای چرخدار با موتورهای نرم یا رباتهایی که به نیروگاهها نظارت میکنند ادغام کنند.
جزئیات
یافتهها
ی تیم در مجله
علوم پیشرفته
منتشر شد.



{kind=link}