
موتور جدید سیال بدون نیاز به منبع خارجی رباتهای نرم شبیه ماهیچه را اداره میکند

تیمی از مهندسان موتور سیال فوق سبکی برای قدرتدهی به رباتهای نرم در دستگاههای کمکی توسعه دادهاند.
ویژگی برجسته موتور جدید، توانایی تولید نیروی قابل توجه به صورت خودمختار و بدون وابستگی به منبع قدرت خارجی است.
به گفته محققان دانشگاه ایالتی کارولینای شمالی، این موتور بر اصول دینامیک سیالات کار میکند. موتور جدید با هدایت روغن به داخل و خارج از محفظهای درون یک ربات نرم عمل میکند.
موتور سیال با نیروی زیاد
رباتهای نرم که توسط موتورهای سیالی مانند سیستمهای هیدرولیکی یا نیوماتیکی قدرت میگیرند، میتوانند رفتار ماهیچه را به روشی تقلید کنند که رباتهای سفت نمیتوانند. این ویژگی آنها را برای دستگاههای کمکی که هدفشان افزایش تحرک در اندامهای بالایی و پایینی است، بسیار جذاب میسازد.
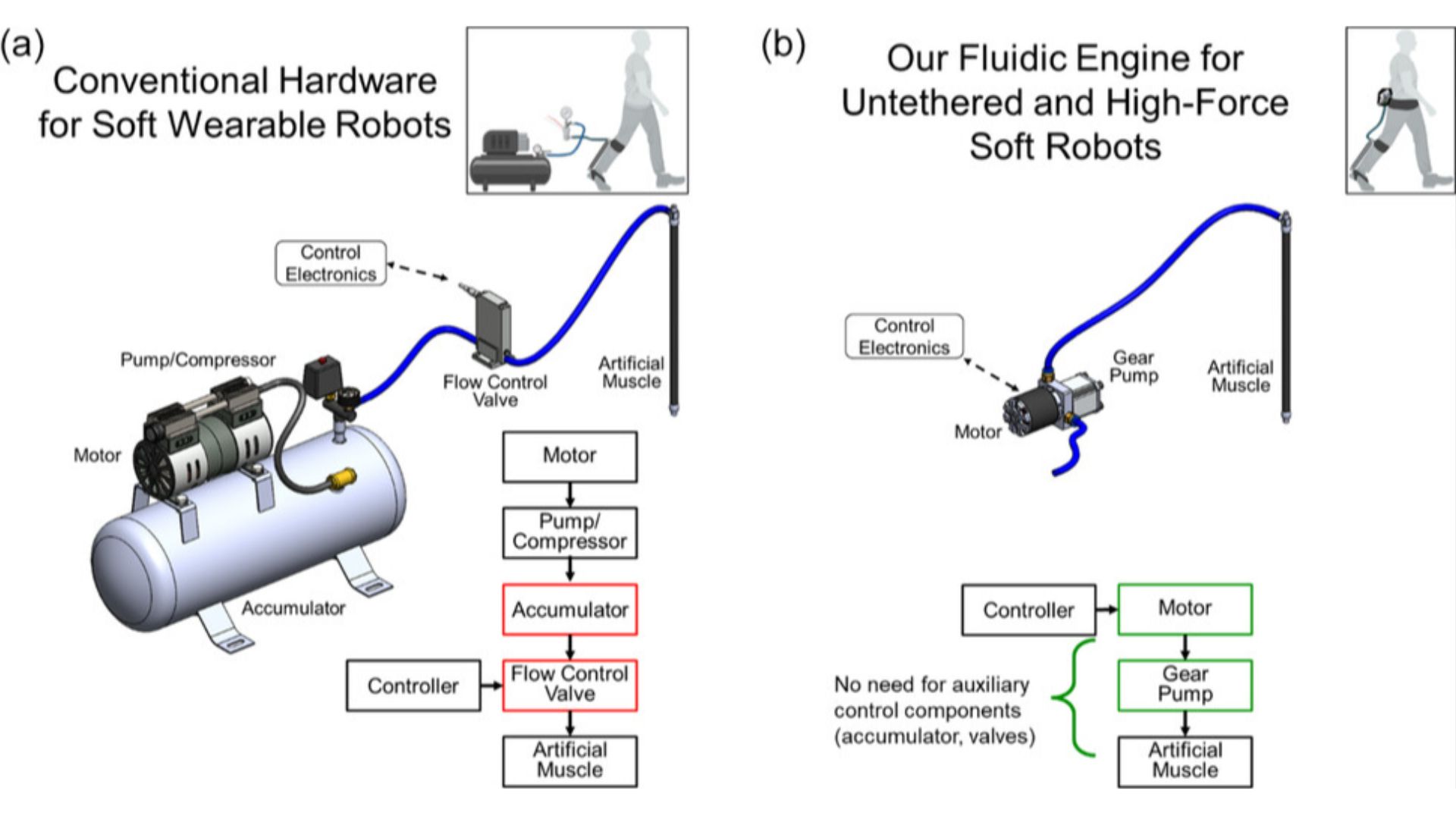
با این حال، موتورهای سیالی سنتی عموماً به منابع قدرت خارجی مانند کمپرسورهای هوای بزرگ متصل هستند که بسیار قابلیت تغییرپذیری آنها را محدود میکند.
به گفته محققان، تلاشهای قبلی برای موتورهای سیالی که به منابع قدرت خارجی وابسته نیستند در تولید نیروی کافی مشکل داشتند و کاربرد عملی آنها را محدود کرده است.
«کار ما در اینجا به هر دو چالش میپردازد. موتور سیالی ما به منبع خارجی متصل نیست اما همچنان میتواند تا 580 نیوتون نیرو تولید کند»، گفت هائو سو، استادیار مهندسی مکانیک و هوافضا در دانشگاه و نویسنده مطالعه، در یک بیانیه .
موتور سیالی محققان دارای پمپ است که توسط موتور گشتاور بالایی که توسط باتری تامین میشود، تامین میگردد. فشار حاصل شده به ماهیچه مصنوعی اجازه میدهد تا نیروی قابل توجهی تولید کند.
این راهحل از طراحی دو قسمتی استفاده میکند. اول، سیستم درایو مستقیم با موتور، پمپ چرخدنده و ماهیچه مصنوعی هیدرولیکی (HAM) یک تنظیم سبک و بدون شیر ایجاد میکند. دوم، یک موتور سیالی با موتور گشتاور بالا و پمپ چرخدنده سفارشی فشار بالایی را برای اداره HAM تولید میکند که نیروهای قوی ارائه میدهد.
در طول آزمایشهای مفهومسازی، محققان توانایی تولید نیرو و بهرهوری موتور جدید را در تبدیل برق به نیروی سیالی ارزیابی کردند.
رباتیک نرم کارآمد
آزمایشها نشان دادند که در مقایسه با طراحیهای سنتی که به منابع ثابت متصل بوده و یا از نظر نیرو محدود هستند، طراحی جدید به قابلیت حمل (3.5 پوند) و توانایی تولید نیروی بالا (580 N) دست یافته است، که برای کاربردهای نیروی سبک و مقیاس انسانی در محیطهای اجتماعی بسیار مهم است.
نتایج آزمایشگاهی نشان میدهد که این سیستم تا 0.75 MPa فشار با 15 درصد بهرهوری اوج تولید میکند، و ماهیچه McKibben را با نیروی 580 N و ضریب انقباض 21 درصد اداره میکند.
تیم ادعا میکند که با ترکیب تعادل هیدرولیکی و کنترل الکتریکی، این روش چگالی توان بالایی را ارائه میدهد که برای کاهش وزن در دستگاههای کمکی و هوافضا ضروری است.
«ما دریافتیم که قادر به تولید نیروی بیسابقهای برای یک موتور بدون اتصال، در حالی که وزن موتور سیالی را کم نگه داشتهایم بودیم، و بهرهوری حداکثری موتور سیالی ما بیشتر از موتورهای قابل حمل و بدون اتصال قبلی است»، گفت آنتونیو دی لیلو، پژوهشگر فوق دکتری در دانشگاه و نویسندهی اول مطالعه.
محققان میگویند که مطالعات آینده به بررسی کنترل دو عملگر نرم به صورت آنتاگونیستی خواهند پرداخت که ممکن است ماهیچههای مصنوعی را تقلید کنند. دستگاههای پوشیدنی مفهومسازی شده پتانسیل این سیستم را برای استفاده بدون اتصال در کمک به اندامهای بالایی و پایینی بدن نشان میدهند.
جزئیات تیم تحقیقات در مجله سیستمهای هوشمند پیشرفته منتشر شد.



