
پاهای چندکاره قدرت ربات الهام گرفته از پرندگان برای پرواز و حرکت روی زمین فراهم میکند
پژوهشگران رباتی شبیه پرنده توسعه دادهاند که قادر به پیادهروی، جهیدن و پرواز است.
این طراحی به نام RAVEN (وسیله نقلیه الهام گرفته از پرندگان برای محیطهای متعدد) با پاهای چندکاره که از پرندگان الهام گرفته شدهاند ساخته شده است.
این پاها به ربات امکان میدهند که بهسادگی بین پیادهروی، جهش از موانع و پرش برای پرواز، شبیه حرکتهای متنوع پرندگان تغییر وضعیت دهد.
به گفته پژوهشگران در EPFL، توانایی ربات برای تغییر بین پیادهروی و پرواز میتواند راه را برای پهپادهای پیشرفتهای که برای محیطهای چالشبرانگیز طراحی شدهاند هموار کند.
پژوهشگران در چکیده مطالعات میگویند: «پاهای رباتهای چندکاره فرصتهای جدیدی برای بهرهبرداری از هواپیماهای با بال ثابت در زمینهای پیچیده از طریق برخاستن خودکار و گامهای چندوجهی ایجاد میکنند.»
پرواز با تطبیقپذیری ملاقات میکند
پرندگان در گذار بین زمین و هوا متبحر هستند و بالهایی دارند که برای پرواز تخصصی شدهاند و اندامهای عقب آنها برای پیادهروی، جهیدن، پرش و بلند شدن تطبیق یافتهاند. مهندسان، با الهام از این ترکیبپذیری، قصد دارند چنین تطبیقپذیری را در رباتهای هوانورد بیاموزند تا کارکرد آنها را در محیطهای متنوع گسترش دهند.
با این حال، دستیابی به این امر چالشبرانگیز است، زیرا پیادهروی و پرش شامل ترکیبی از حرکتهای مختلف و راهاندازیهای پیچیده میشود. پیچیدگی حفظ طراحیهای سبک وزن که برای پرواز ضروری است، محدودیتهایی در بیشتر رباتهای هوایی ایجاد میکند و آنها را به تنها یک وضعیت حرکت اضافی محدود میکند.
پژوهشگران میگویند، هماهنگی بین سادگی مکانیکی و تطبیقپذیری همچنان به عنوان چالش اصلی در توسعه رباتهایی که قادر به یکپارچه سازی چندین حالت حرکت هستند باقی میماند.
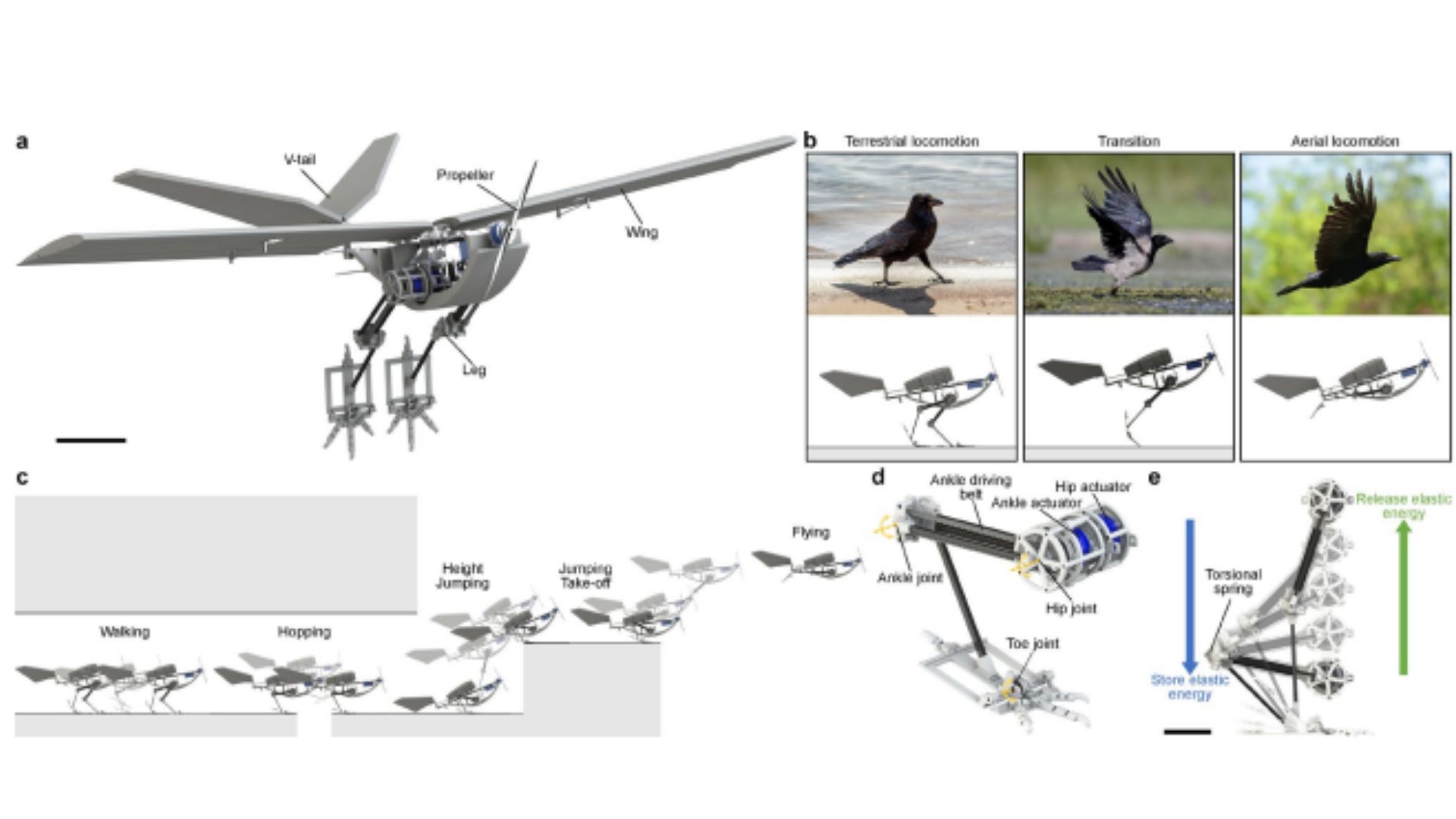
RAVEN، پهپادی الهام گرفته از پرنده، پیشرفت قابل توجهی در تقلید از حرکت پرندهای نشان میدهد. در حالی که پاهای مکانیکی آن پیچیدگی پاهای واقعی پرندگان را ندارند، اتکا به اصول بیولوژیکی کلیدی مانند فنرهای ذخیرهکننده انرژی شبیه تاندون و انگشتان انعطافپذیر امکان حرکت مشابه پرندگان را فراهم میکند.
به اندازه یک کلاغ، RAVEN دارای بالهای 100 سانتیمتر و طول بدنه 50 سانتیمتر است. در کمتر از چهار ثانیه یک متر پیادهروی میکند، از موانع 12 سانتیمتری جهش میکند و بر روی موانع 26 سانتیمتری پرش میکند. در هنگام برخاست، پاهای آن ربات را تا ارتفاع نزدیک به 0.5 متر با سرعت پیشروی 2.2 متر بر ثانیه سوق میدهند.
به گزارش IEEE Spectrum، برای دستیابی به زوایای دقیق برخاست، مفاصل پنجهکشی انعطافپذیر امکان گذارهای متنوعی را بدون افزودن وزن اضافی فراهم میکنند. برخلاف رباتهای دوی پای که برای کنترل دقیق پا از عملگرها استفاده میکنند، طراحی RAVEN وزن را به حداقل میرساند، عاملی بحرانی برای پرواز. وزن آن 620 گرم است که 230 گرم به پاها، انگشتان، عملگرها و اجزای ضروری برای چند کاره بودن اختصاص دارد.
حرکت موثر پهپاد
پژوهشگران بررسی کردند که آیا پیچیدگی افزوده شده به پاهای RAVEN توجیهپذیر است و دریافتند که بسیار مفید است. پاها امکان پیادهروی، برخاستن از زمین و پرش را فراهم میکنند، بهطوری که پرش ده برابر بیشتر از برخاستهای استاتیک در صرفهجویی انرژی موثر است.
برخاستهای غیرپرجنده، که با پهپاد در زاویه بهینه تست شدند، به پرواز ناپایدار و ناکارا منجر شدند. برخاستهای پرش، اما، امکان گذارهای صافتر را با تبدیل کارآمد انرژی عمل به انرژی جنبشی و پتانسیل فراهم میکنند.
به گزارش IEEE Spectrum ، پاهای RAVEN نیز راندمان انرژی را در حرکت زمینی بهبود میبخشند و نیاز به پروازهای کوتاه مکرر را کاهش میدهند. با الهام از پرندگان، پاها پتانسیل اضافه کردن funções اضافی مانند کاستن سرعت برای فرود، شنا کردن، ماندن و دستکاری اشیاء را دارند، اگرچه اینها نیاز به طراحی و سیستمهای پیشرفتهتری دارند.
توسعه طرح برای پهپادهای بزرگتر ممکن است، با کاربردهای آینده شامل تحویل. پهپادهای با بال ثابت بزرگتر میتوانند از برخاستهای پرش مشابه با RAVEN استفاده کنند، همراه با فناوریهایی مانند سیستمهای اجتناب از موانع و بالهای تاشو برای ناوبری در فضاهای تنگ. پژوهشگران به بهبود RAVEN ادامه میدهند تا آن را بیشتر شبیه پرنده و تطبیقپذیر کنند.
جزئیات تحقیق تیم در مجله Nature به چاپ رسیده است.



