کوچکترین رباتهای متحرک جهان اندازهگیری نیرو در مقیاس میکرو را بازتعریف میکنند
یک تیم از محققان در دانشگاه کرنل کوچکترین ربات متحرک جهان را توسعه دادهاند.
این ربات برای تعامل با نور مرئی طراحی شده و با وجود اندازه بسیار کوچکش به طور مستقل حرکت میکند.
این تیم ادعا میکند که ربات میتواند مکانهای خاصی را مانند نمونههای بافتی طی کند تا تصاویر بگیرد و نیروها را در مقیاس کوچکترین ساختارهای بدن اندازهگیری کند.
پروفسور پال مکیوئن، استاد بازنشسته علوم فیزیکی در کالج هنر و علوم، که رهبری این تیم را بر عهده داشت، در بیانیهای گفت: «ربات متحرکی که به اندازهای کوچک است که میتواند با نور تعامل کند و موثر باشد، لنز میکروسکوپ را مستقیم به دنیای میکرو میبرد. این میتواند به روشهایی که یک میکروسکوپ معمولی هرگز نمیتواند، از نزدیک تصویربرداری کند».
تحرک در مقیاس میکرون
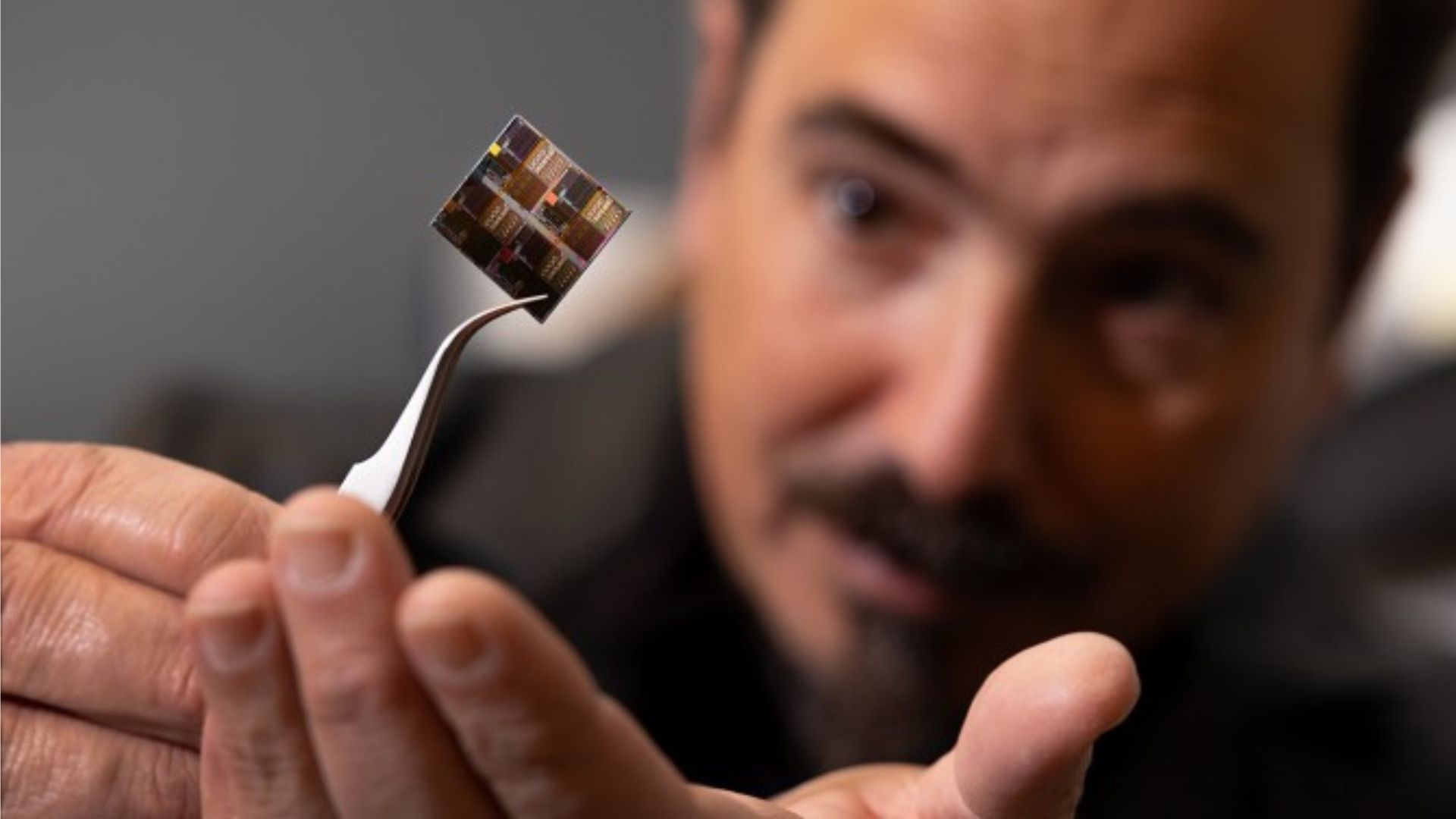
رباتهای انکساری محققان کرنل فقط ۲ تا ۵ میکرون اندازه دارند که به طور قابل توجهی از رباتهای قبلی که ۴۰-۷۰ میکرون اندازه داشتند، کوچکتر هستند.
این رباتهای جدید برای کار در مقیاسی طراحی شدهاند که با انکسار نور مرئی سازگار است، به آنها این امکان را میدهد که با تکنیکهای تصویربرداری که بر پایه خم شدن امواج نور از طریق فضاهای کوچک است، تعامل کنند.
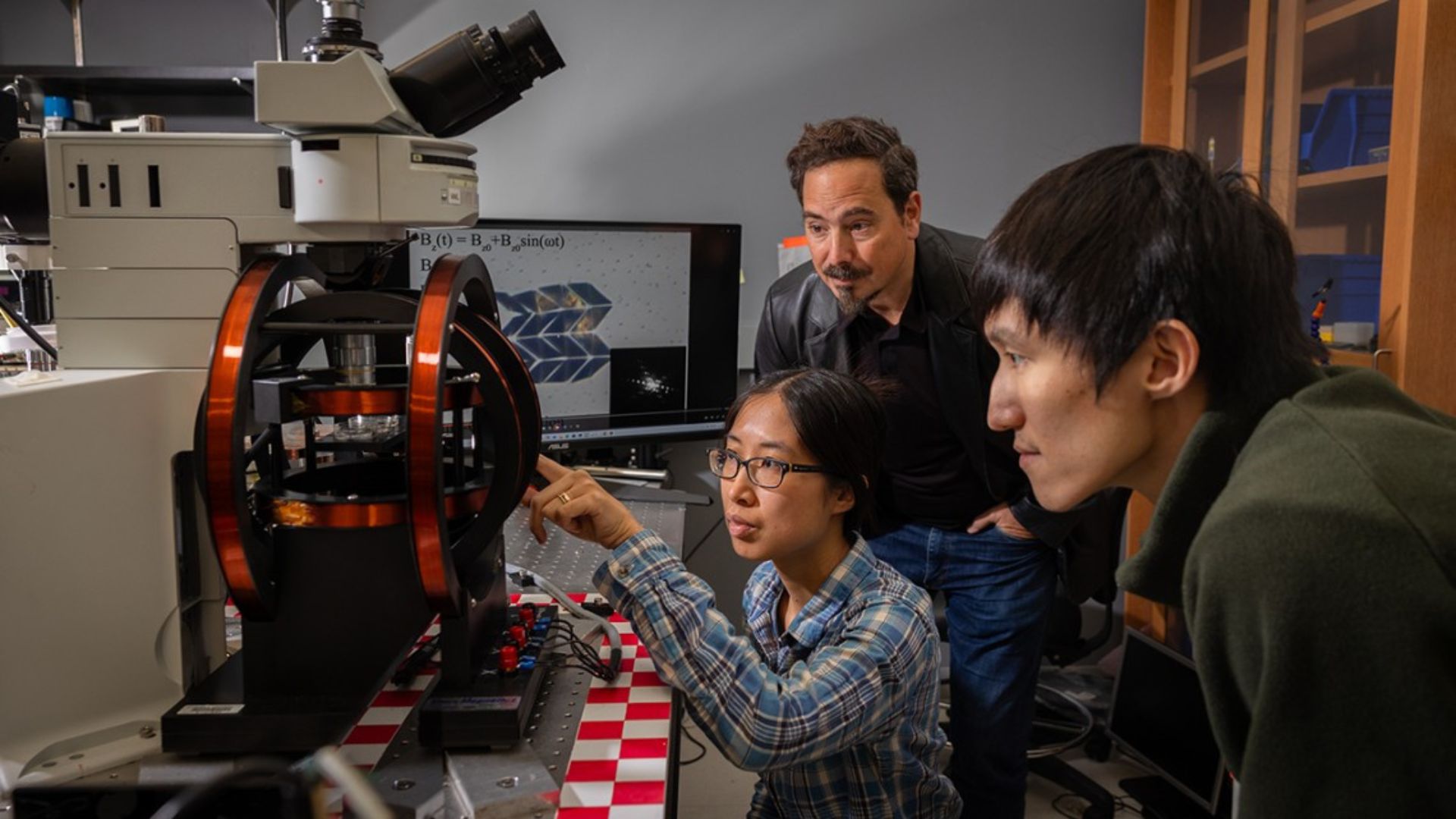
طراحی نوآورانه به رباتها اجازه میدهد تا به صورت مستقل حرکت کنند، این امر امکان رسیدن به اهداف دقیق برای تصویربرداری و اندازهگیری را فراهم میکند. با استفاده از میدانهای مغناطیسی برای کنترل حرکت، پژوهشگران به دستکاری دقیق این دستگاههای کوچک دست یافتهاند.
این پیشرفت ترکیبی از حرکت رباتیک بدون بند و تصویربرداری پیشرفته نوری است که نیازهای دوگانه انطباق با مقیاس طول موج نور و اطمینان از حرکت مستقل را برآورده میکند.
به گفته محققان، این پیشرفتها راه را برای کاربردهایی در تصویربرداری و تشخیصهای میکروسکوپی هموار میسازند و ابزاری جدید برای کاوش و تحلیل ساختارهای بیولوژیکی پیچیده ارائه میدهند.
روی یک سطح جامد، رباتها میتوانند با کنترل آهنرباهایی که به آنها فشار میآورند به جلو حرکت کنند یا همین عمل را برای "شنا" در مایعات انجام دهند.
به گفته کارشناسان، ترکیب فناوری نوری زیر انکساری، انعطافپذیری و حرکت، یک پیشرفت بزرگ در رباتیک است.
فرانچسکو مونتیکونه، استاد مهندسی برق و کامپیوتر در کرنل و یکی از نویسندگان این مطالعه، در بیانیهای گفت: «کاهش اندازه رباتها بالاخره به نقطهای رسیده است که این سیستمهای مکانیکی فعال میتوانند با نور در مقیاس فقط چند طول موج تعامل کنند و آن را شکل دهند - یعنی یک میلیون بار کوچکتر از یک متر».
افزایش تصویربرداری
برای راندن رباتها در مقیاس میکرو، پژوهشگران دستگاهها را با آهنرباهایی در مقیاس نانومتر و با دو شکل متمایز: بلند و نازک یا کوتاه و چاق الگو کردهاند. این طراحیها اجازه کنترل انتخابی با استفاده از میدانهای مغناطیسی را میدهند.
یک میدان مغناطیسی بزرگتر همه آهنرباها را تراز میکند، در حالی که میدان کوچکتر تنها آنهایی که کوتاه و چاق هستند را معکوس میکند. این اصل، به همراه فیلمهای فوق باریک ساخته شده در یک مرکز علم و فناوری نانوساختار، امکان ایجاد این رباتهای نوآورانه را فراهم کرد.
پژوهشگران چالشهای مهندسی نوری را حل کردند تا تطبیق نور، فوکوس و تصویربرداری فرابالایی را برای میکرورباتها بهینه کنند و عملکرد بهینه را بر اساس حرکت و تغییر شکل متعادل کنند.
رباتها میتوانند اجزای انکساری را بهصورت مکانیکی تنظیم کنند تا تصویربرداری را افزایش دهند، بهعنوان شبکههای انکساری یا لنزهای انکساری عمل کنند. آنها بهعنوان ادامهای از لنزهای میکروسکوپ عمل میکنند و وضوح تصویری را بهبود میبخشند. علاوه بر این، حرکت انقباضی ناشی از مغناطیس، که راه رفتن را تسهیل میکند، امکان اندازهگیری نیرو را با فشار به ساختارهای میکروسکوپی برای تحلیل دقیق فراهم میکند.
مونتیکونه گفت: "به آینده نگریسته و میتوانم تصور کنم که گروههایی از میکروباتهای انکساری در حال انجام میکروسکوپی فوق رزولوشن و دیگر وظایف حسی در حین حرکت بر روی سطح یک نمونه باشند. فکر میکنم ما واقعاً تازهایم که داریم به سطحی دست مییابیم از آنچه با این پارادایم جدید که مهندسی رباتیک و نوری را در مقیاس میکرو ترکیب میکند، امکانپذیر است."
جزئیات تحقیقات تیم در مجله Science منتشر شده است.