430,000 برابر سریعتر از واقعیت: موتور فیزیک جدید آموزش رباتهای هوشمند را تسریع میکند
آموزش رباتیکهای هوش مصنوعی به طور قابل توجهی با کمک ابزار جدیدی افزایش یافته است. این ابزار به نام 'جنسیس'، یک سیستم شبیهسازی کامپیوتری منبعباز جدید است.
توسط یک گروه بزرگ از محققان دانشگاهی و صنعتی خصوصی افشا شده است و ادعا میشود که سیستم به رباتها اجازه میدهد وظایف را در واقعیت شبیهسازی شده 430,000 برابر سریعتر از دنیای واقعی تمرین کنند.
به گفته محققان، یک عامل هوش مصنوعی نیز قرار است برای تولید شبیهسازیهای فیزیکی 3D از تراگحها ایجاد شود.
قدرتمند شده توسط یک موتور فیزیکی جهانی
جنسیس، که توسط یک موتور فیزیکی
طراحی
شده و از ابتدا بازسازی شده، مجموعهای از حلکنندگان فیزیک مختلف و ترکیب آنها را در یک چارچوب واحد یکپارچه میکند. این موتور فیزیکی هسته به وسیله یک چارچوب تولیدی تقویت شده که در سطح بالا عمل میکند، با هدف تولید خودکار داده برای رباتیک و زمینههای دیگر. چارچوب تولیدی هدفش خودکارسازی تولید داده و انواع مختلف آن است.
برای رباتیکهای چندمنظوره، هوش مصنوعی مجسم و برنامههای هوش مصنوعی
فیزیکی
طراحی شده است، این سیستم یک موتور فیزیکی جهانی است که قادر به شبیهسازی مواد گوناگون و پدیدههای فیزیکی مختلف است.
صدای گفتار، انیمیشن چهره
سیستم که سبک وزن، فوقالعاده سریع، پایتونیک و پلتفرم شبیهسازی رباتیک کاربرپسند است، ابزار رندرینگ فوتو-رئالیستیک پرقدرت و سریع است.
محققان ادعا کردهاند که در حال حاضر در حال منبعباز کردن موتور فیزیکی و پلتفرم شبیهسازی زیرین هستند. طبق گفته تیم تحقیقاتی، دسترسی به چارچوب تولیدی به تدریج در آینده ارائه خواهد شد.
چارچوب به دنبال یکپارچهسازی ویدیوهای فیزیکی دقیق و سازگار با فضا، حرکت دوربین و پارامترها، حرکت شخصیتهای انسانی و حیوانی، سیاستهای دستکاری و جابهجایی رباتیک، صحنه سهبعدی تعاملی کامل، صدای گفتار، انیمیشن و بیان چهره است.
سیستم از محاسبات موازی شتابگرفته توسط GPU بهره میبرد
تیم ادعا میکند که جنسیس یک موتور فیزیکی بسیار بهینهشده است که از محاسبات موازی شتابگرفته توسط GPU بهره میبرد، با ویژگیهایی مانند بررسی برخورد بهینهشده، خواب خودکار، جزیره تماس و غیره.
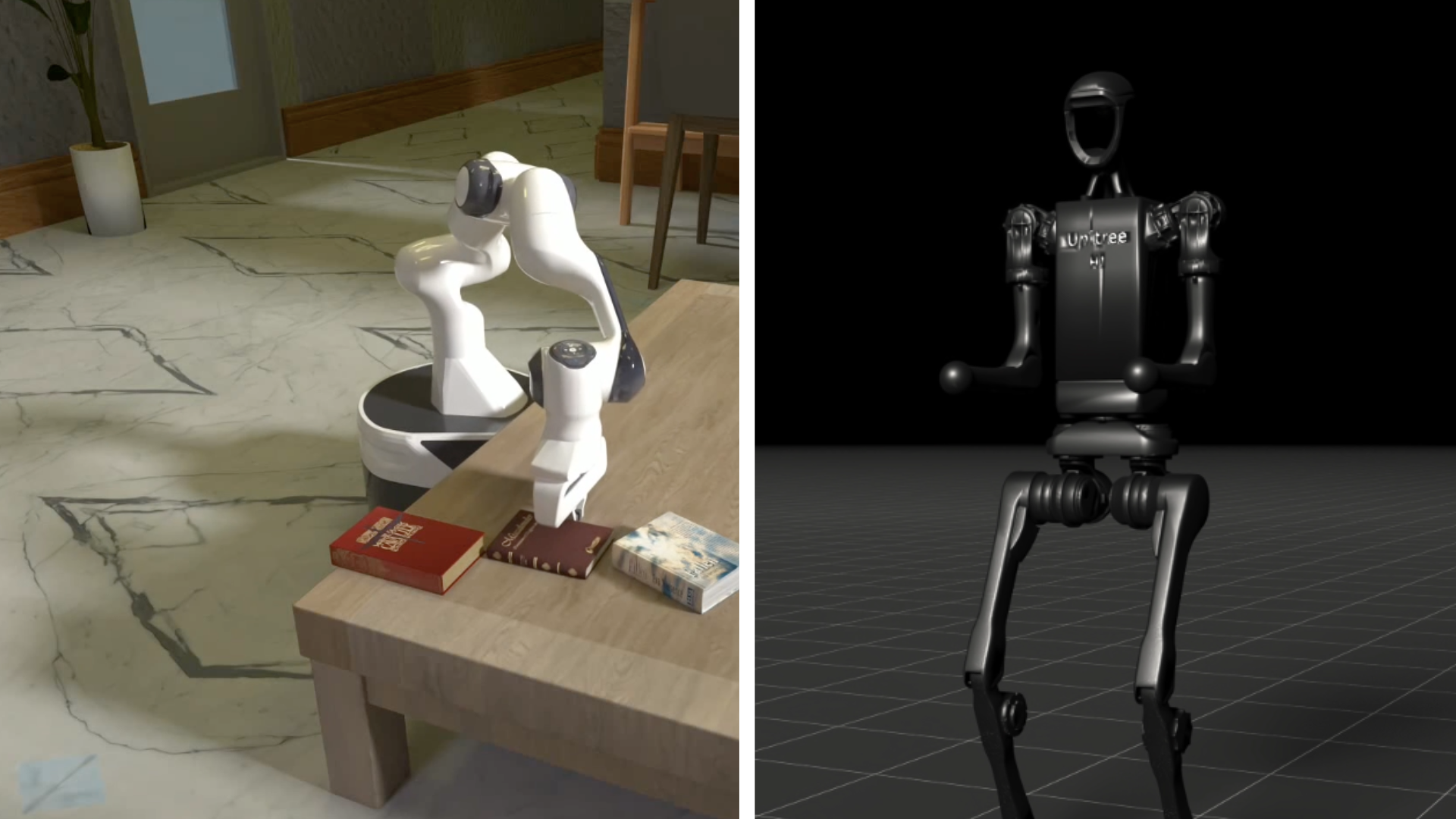
در شبیهسازی مقیاس بزرگ، جنسیس از خواب خودکار برای تسریع شبیهسازی واحدهایی که در وضعیتهای همگرا و ایستا هستند، استفاده میبرد. (این ویژگی در حال آزمایش است و در نسخه 0.1.1 منتشر خواهد شد). هنگام شبیهسازی صحنه دستکاری (با یک صفحه واحد و بازوی فرانکا)، جنسیس با سرعت 43 میلیون FPS عمل میکند، که 430,000 برابر سریعتر از زمان واقعی است، طبق یک
بیان
توسط محققان.
"اگر یک هوش مصنوعی بتواند 1,000 ربات را به انجام 1 میلیون مهارت در 1 میلیارد شبیهسازی مختلف هدایت کند، سپس ممکن است در دنیای واقعی ما، که فقط یک نقطه دیگر در فضای عظیم واقعیتهای ممکن است، کار کند. این اصل اساسی است که چرا شبیهسازی برای رباتیک بسیار موثر عمل میکند، "
گفته
توسط محقق انویدیا جیم فن، که "بخشی کوچک" به پروژه کمک کرده است.
تقویت شده توسط عامل تولیدی مبتنی بر VLM
تیم تحقیقاتی نیز ادعا کرده که موتور فیزیکی جنسیس توسط یک عامل تولیدی مبتنی بر VLM که از APIهای ارائه شده توسط زیرساخت شبیهسازی به عنوان ابزارهایی برای ایجاد جهانهای پویا 4D استفاده میکند، تقویت شده است، که میتواند به عنوان منبع داده بنیادی برای استخراج انواع مختلف دادهها استفاده شود.
"به همراه ماژولهایی برای تولید حرکت دوربین و شیء، ما قادر به تولید ویدئوهای دقیق فیزیکی و سازگار با نمایه و سایر انواع داده هستیم، " محققان گفتهاند.
"موتور فیزیکی جنسیس در پایتون خالص توسعه یافته است، در حالی که 10-80 برابر سریعتر از پشتههای شتابگرفته با GPU موجود مانند آیزاک جیم و MJX است. سرعت شبیهسازی آن ~430,000 برابر سریعتر از زمان واقعی است، و تنها 26 ثانیه طول میکشد تا سیاست جابهجایی رباتیکی که به جهان واقعی منتقل شود، روی یک RTX4090 آموزش دهد، " ژو شیان ، که بخشی از پروژه بوده و در حال حاضر دکترای خود را در رباتیک و هوش مصنوعی از موسسه رباتیک CMU دنبال میکند، گفته است.