
اسکلت خارجی زانو با موتورهای پهپاد امکان بلند کردن ایمن با پشتیبانی تطبیقی از وظایف را فراهم میکند
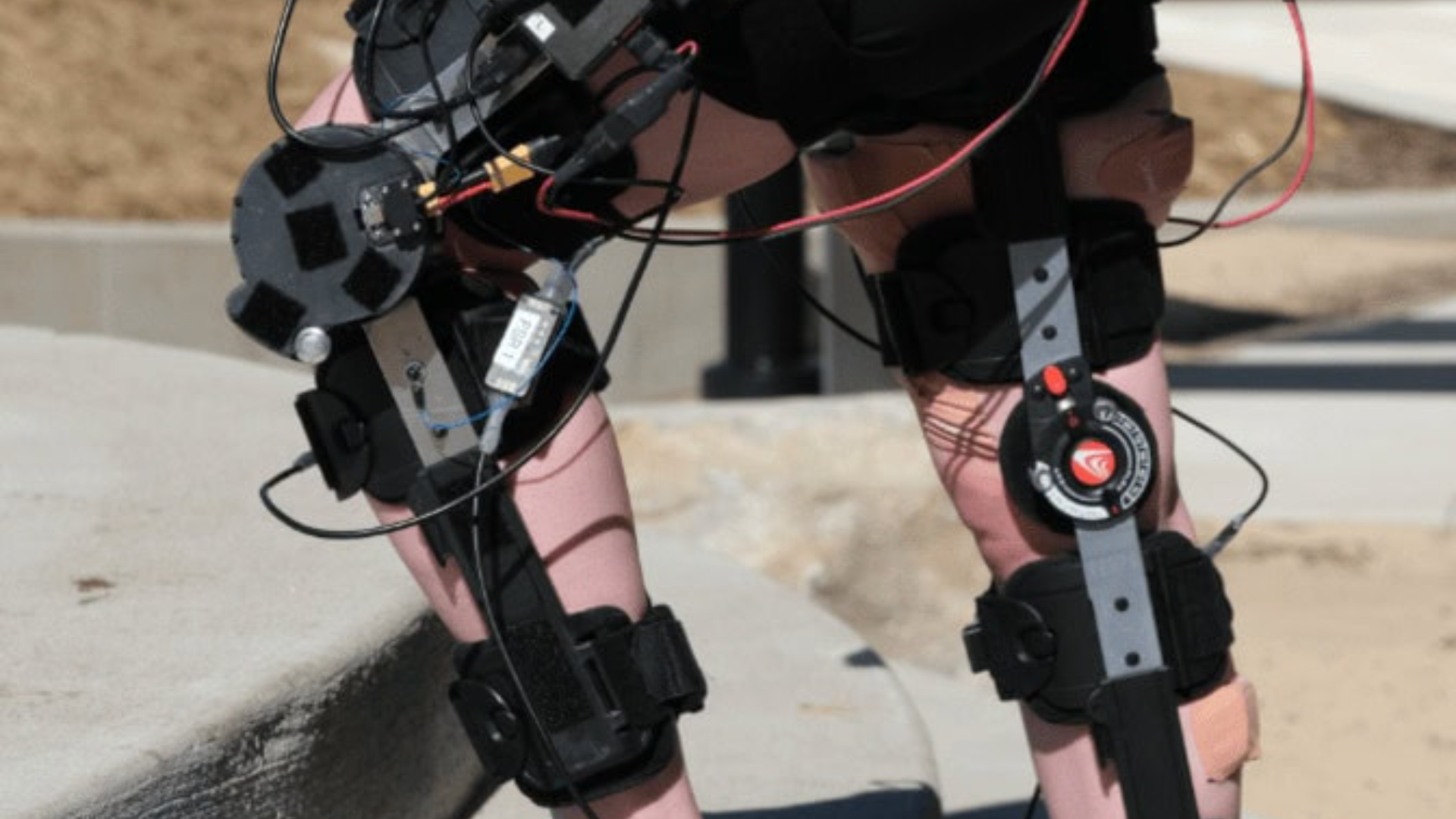
یک مجموعه اسکلت خارجی زانو، ساخته شده با محافظهای زانویی تجاری و موتورهای پهپاد در دانشگاه میشیگان، نشان داده است که به کاهش خستگی در وظایف بلند کردن و حمل کمک میکند.
این اسکلتها به کاربران کمک میکنند تا حتی در حالت خستگی وضعیت صحیح بلند کردن را حفظ کنند که این امر برای جلوگیری از صدمات محیط کار حیاتی است، به گفته محققان.
به گفته رابرت گرگ، استاد مؤسس روباتیک در دانشگاه میشیگان و نویسنده مکاتبهای مطالعه در Science Robotics، تمرکز بر تقویت پاها برای حفظ فرم صحیح بلند کردن است، به جای حمایت از کمر و به خطر افتادن وضعیت حرکتی، که این امر انحرافی از رویههای استاندارد صنعت است.
چالشهای استفاده از اسکلتهای خارجی کمر در ساخت و ساز و تولید
کارگران در صنایع مانند ساخت و ساز و تولید اغلب از محافظهای کمری برای بلند کردن استفاده میکنند، در حالی که اسکلتهای خارجی کمر، فناوری نوظهور، از فنرها یا موتورها برای یاری استفاده میکنند. با این حال، این دستگاهها فرض میکنند که تکنیکهای بلند کردن نادرست، مانند خم شدن، انجام میشود و میتوانند حجیم باشند و برای حرکات غیر از بلند کردن نیاز به غیرفعال شدن دارند که باعث کمتر کارآمد بودن آنها برای وظایف مختلف میشود.
به گفته تیم میشیگان، اسکلتهای خارجی زانو آنها اولینهایی هستند که به عضلات چهارسر ران پشتیبانی میکنند که اکثر نیروی بلند کردن ایمن را تولید میکنند. این روش کمتر مزاحم به محافظت از کارگران در برابر صدمات کمر کمک میکند. شرکت کنندگان در مطالعه، اسکلتهای خارجی را در وظایف بلند کردن و حمل با استفاده از یک کتلبل 20 پوندی آزمایش کردند.
وظایف شامل بلند کردن وزن از زمین، حمل آن در زمین صاف، بالا و پایین شیب و پلهها بود. مطالعه نشان داد که وقتی شرکت کنندگان خسته شدند، اسکلت خارجی به آنها کمک کرد تا وضعیت بهتری داشته باشند و سریعتر بلند کنند—تنها 1% کندتر از سرعت نرمالشان، در مقایسه با 44% کندتر بدون اسکلت خارجی.
این امر برای وظایفی که کارگران نیاز به حفظ سرعت ثابت دارند مهم است، مانند روی یک نوار نقاله. وقتی خسته میشوند، کارگران اغلب سرعت مورد نیاز را حفظ میکنند اما با وضعیت بد، که خطر صدمات را با ایجاد خم شدن بیشتر کمر افزایش می دهد، به گفته نیکیل دیوکار، پژوهشگر فوق دکتری روباتیک در دانشگاه میشیگان و نویسنده اصلی مطالعه.
اسکلتهای خارجی زانو امیدبخش هستند، با رضایت بیشتر کاربران
برای شرکت کنندگان، مزایا واضح بود—آنها گزارش دادند که عمدتاً راضی یا بسیار راضی بودند، به جز هنگام راه رفتن روی سطح صاف که رضایت آنها معتدل بود. این امر با نیاز به کمک حداقل عضلات چهارسر ران در این وظایف آسانتر همخوانی داشت؛ گرگ اشاره کرد که پشتیبانی ارائه شده صرفاً به اندازهای بود که وزن اسکلت خارجی را جبران کند.
یکی از عوامل مهم در راحتی اسکلت خارجی موتورها و دندهها آن است که به کاربران اجازه میدهد تا زانوهای خود را به صورت طبیعی تاب دهند. جنبه مهم دیگر نرمافزار آن است که نیاز به کمک را با اندازهگیری زاویه مفصل زانو، موقعیتهای ران و ساق پا، و نیروی تشخیص داده شده توسط حسگری در کفش کاربران پیشبینی میکند.
با تحلیل این سه اندازهگیری از هر دو پا، سیستم میتواند حرکت مورد نظر کاربران و مقدار کمک لازم را تعیین کند. این اندازهگیریها 150 بار در ثانیه گرفته میشوند، که اجازه میدهد اسکلت خارجی بین فعالیتها به طور یکپارچه جابجا شود.
این روش از بسیاری از کنترلکنندههای اسکلت خارجی که به الگوهای از پیش تعریف شده برای وظایف خاص تکیه دارند، متفاوت است. به گفته گرگ، چنین کنترلکنندههایی میتوانند با جابجایی وظایف دست و پنجه نرم کنند و ممکن است تا یک ثانیه کامل زمان نیاز داشته باشند تا قصد کاربران را درک کنند.
کنترلکننده جدید یک مدل فیزیکی را با یادگیری ماشین ترکیب میکند تا از حرکات غیرمنتظره جلوگیری کند هنگامی که کاربران به شکلی متفاوت از دادههای آموزشی رفتار میکنند، و در حالی که نمونههای آزمایشگاهی حدود 4000 دلار برای هر جفت هزینه دارند، گرگ تخمین میزند که تولید انبوه میتواند قیمت را به حدود 2000 دلار برای هر جفت کاهش دهد.



