
اولین جراحی با دو ربات همزمان: برداشتن غده پروستات و پیشرفت در مراقبتهای کمتهاجمی
در پیشرفتی برای مراقبتهای کمتهاجمی، اولین جراحی با استفاده از دو ربات جداگانه با موفقیت انجام شد.
یک پزشک ارولوژیست در مرکز پزشکی دانشگاه تگزاس (UT) غربی با موفقیت غده پروستات را با استفاده از سیستمهای پیشرفته رباتیک برداشت.
این جراحی پلتفرم جراحی Mars از شرکتی بهنام Levita را با ربات تکپورت Da Vinci SP از شرکت Intuitive Surgical ترکیب کرد.
جفری کاددو، یک ارولوژیست و استاد در مرکز پزشکی UT Southwestern، در بیانیهای گفت: «این اولین بار است که دو سیستم مختلف در یک جراحی رباتیک استفاده میشود و تواناییهای پلتفرم Mars از شرکت Levita را نشان میدهد. جزء مغناطیسی Mars ارزش قابلتوجهی با بهبود دقت و امکان دسترسی بهتر به مناطق کلیدی لگن افزود.
در نوامبر، محققان پزشکی با استفاده از یادگیری تقلیدی از ویدئوهای جراحی، سیستمی را آموزش داده و بهطور مستقل عملهای پیچیدهایی انجام دادند که جراحی رباتیک را به سمت عملیات مستقل بدون برنامهریزی دقیق جلو برد.
پیشرفت در مراقبت با رباتیک
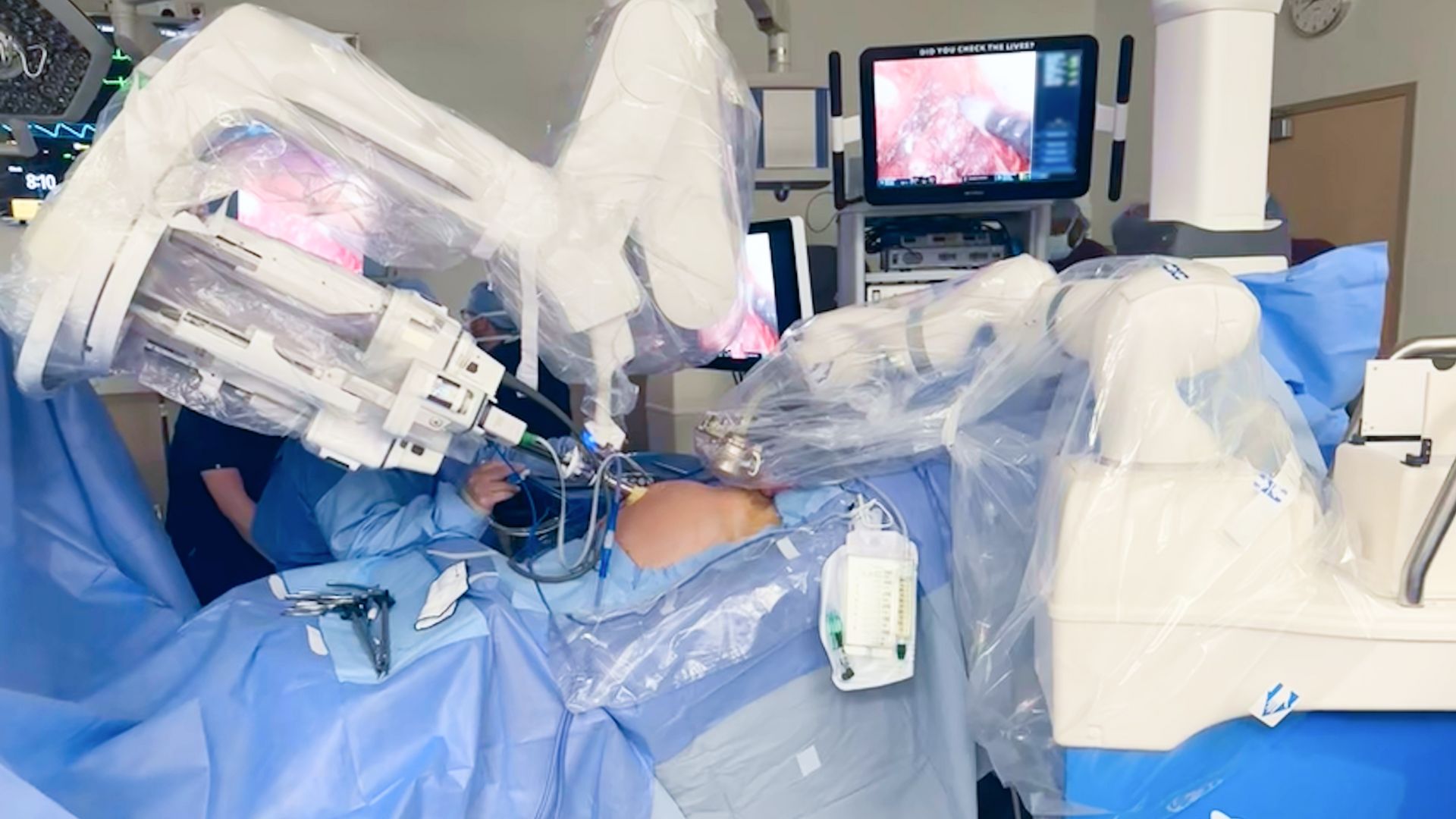
در طول جراحی برداشتن پروستات، از پلتفرم MARS شرکت Levita برای جابجایی اندامهای داخلی با استفاده از سیستم موقعیتیابی مغناطیسی استفاده شد.
این امکان فراهم آمد که با هدف بهبود دید و محافظت از اعصاب مربوط به عملکرد جنسی و کنترل ادرار، بافتها با دقت خاصی کشیده شوند. در نزدیکی غده پروستات دستههای عصبی-عروقی قرار دارند که عملکرد نعوظ و کنترل ادرار را کنترل میکنند.
ربات Da Vinci SP توانایی تکپورت مورد نیاز برای این عمل پیچیده اورولوژیک را فراهم کرد. تیم جراحی پیشنمایشی از آینده جراحی کمکی رباتیک، جایی که چند سیستم به صورت هماهنگ برای تولید بهترین نتایج ممکن کار میکنند، با ادغام این دو سیستم نشان دادند.
طبق گفته شرکت Levita، این جراحی نوآورانه برتریهای ترکیب سیستمهای رباتیک برای مراقبت پیشرفته بیماران را نشان می دهد. ربات Da Vinci SP دسترسی تکپورت دقیق و پلتفرم MARS فناوری مغناطیسی را برای حداقل برشها و افزایش مانورهای جراحی ارائه میدهد. با هم، این فناوریها یک روش اختصاصی برای رفع نیازهای پیچیده جراحی فراهم میکنند.
آلبرتو رودریگز-ناوارو، مدیر عامل و بنیانگذار Levita Magnetics، در بیانیهای گفت: «این جراحی نشان داد که پلتفرم MARS هم یک راه حل مستقل جراحی و هم یک افزودنی قدرتمند به سیستمهای رباتیک کنسولپایه سنتی است. با ترکیب فناوریها، ما یک استاندارد جدید برای جراحی ایجاد میکنیم که اولویت آن ایمنی بیمار، کارایی و نتایج بهتر است."
نزدیک به خودمختاری
در یک تمرین قبلی، محققان استنفورد یک ربات سیستم جراحی da Vinci را در کارهای کلیدی مانند دستکاری سوزن، بالا بردن بافت و دوختن با استفاده از یادگیری تقلیدی آموزش دادند.
ربات با تحلیل دادهها از دوربینهای نصبشده بر روی مچ سیستمهای Da Vinci در طول جراحیها، مهارتهای مشابه جراحان انسانی را نشان داد. این ضبطها که به صورت جهانی جمعآوری شدهاند، مواد آموزشی گستردهای فراهم میکنند.
این مدل با الهام از تکنیکهای یادگیری ماشین حرکات رباتیک را با استفاده از محاسبات سینماتیک به جای ورودی متنی پردازش میکند. با تمرکز بر حرکات نسبی به جای حرکات مطلق، محققان بر نواقص سیستم Da Vinci غلبه کردند.
طبق گفته محققان، این رویکرد ربات را قادر ساخت تا به طور مستقل وظایف را انجام دهد، مانند ادامه یک روند بعد از برداشتن سوزن افتاده.
این مدل به طور قابل توجهی زمان مورد نیاز برای آموزش رباتهای جراحی را که قبلاً به سالها کدنویسی دقیق برای هر اقدام نیاز داشتند، کاهش داد. با یادگیری تقلیدی، رباتها میتوانند وظایف را از روشهای متنوع در روزها تعمیم دهند، جراحی مستقل را پیشرفت دهند در حالی که دقت را افزایش داده و اشتباهات را کاهش میدهند.



