
رباتها بدون پوست مصنوعی: یادگیری حس لمس انسانی با حسگرهای داخلی و هوش مصنوعی

محققان روشی برای اهدا حس لمس به رباتها با تلفیق حسگرهای نیروی داخلی و الگوریتمهای یادگیری ماشینی توسعه دادهاند.
این روش که توسط تیمی از مرکز فضایی آلمان (DLR) توسعه یافته، به رباتها اجازه میدهد لمس انسانی را بدون نیاز به پوست مصنوعی گرانقیمت یا حسگرهای اضافی بر روی سطح آنها حس و تفسیر کنند.
تیم با استفاده از حسگرهای داخلی با وضوح بالا و یادگیری عمیق، یک بازوی رباتیک را با حس لمس تمام بدن مجهز کردند که قادر به شناسایی دقیق جزئیات نیرو است.
محققان اعلام کردند: «حس لمس ذاتی که در این کار پیشنهاد کردهایم، میتواند پایهای برای دستهای پیشرفتهتر از تعامل فیزیکی انسان-ربات باشد که تاکنون ممکن نبوده است و امکان تغییر از حالتهای معمول به سمت سازگاری، انعطاف و کنترل شهودی را فراهم میکند.»
تعامل انسان-ربات
قابلیتهای سیستمهای رباتیک مدرن به سرعت در حال پیشرفت است و آنها را به همکاران امیدوارکنندهای در زمینههای مختلف از جمله تولید، اکتشاف فضایی، مراقبتهای بهداشتی و کمک روزمره تبدیل میکند.
همگرایی حل مسئله و استدلال انسانی با دقت رباتیک یک حوزه پژوهشی فعال، به ویژه در تعامل انسان-ربات (HRI) است.
رویکردهای مختلف HRI مانند مبتنی بر دید، شناسایی صدا و تماس فیزیکی مورد بررسی قرار گرفته است، اما دستیابی به تعامل فیزیکی شهودی همچنان چالشبرانگیز است.
بالا بردن قابلیت رباتها به حس لمس برای تعاملات امن و کارآمد بسیار مهم است، که امکان شناسایی دقیق تماسهای فیزیکی را فراهم میکند. محققان میگویند حسگرهای نیروی سنتی برای کنترل استفاده میشوند، اما حس کردن لمسی صریح برای اطلاعات تماس دقیق ضروری است.
اگرچه پیشرفتهایی در زمینه پوستهای مصنوعی لمسی و حسگرها صورت گرفته است، چالشهایی در پوشش، سیمکشی، استحکام و قابلیت زمان واقعی باقی ماندهاند.
محققان معتقدند که رباتها باید با حسگرهای حساس و مقاومی مجهز شوند که بتوانند نیرو را حس کنند تا بتوانند بهطور فیزیکی با انسانها تعامل داشته باشند. این میتواند در مواجهه با سطوح بزرگ یا منحنی رباتها پرهزینه و پیچیده شود.
پیشرفت لمسی
محققان مؤسسه رباتیک و مکاترونیک DLR با استفاده از حسگرهای یکپارچه، رباتی را با قابلیتهای لمسی تعبیهشده مجهز کردند.
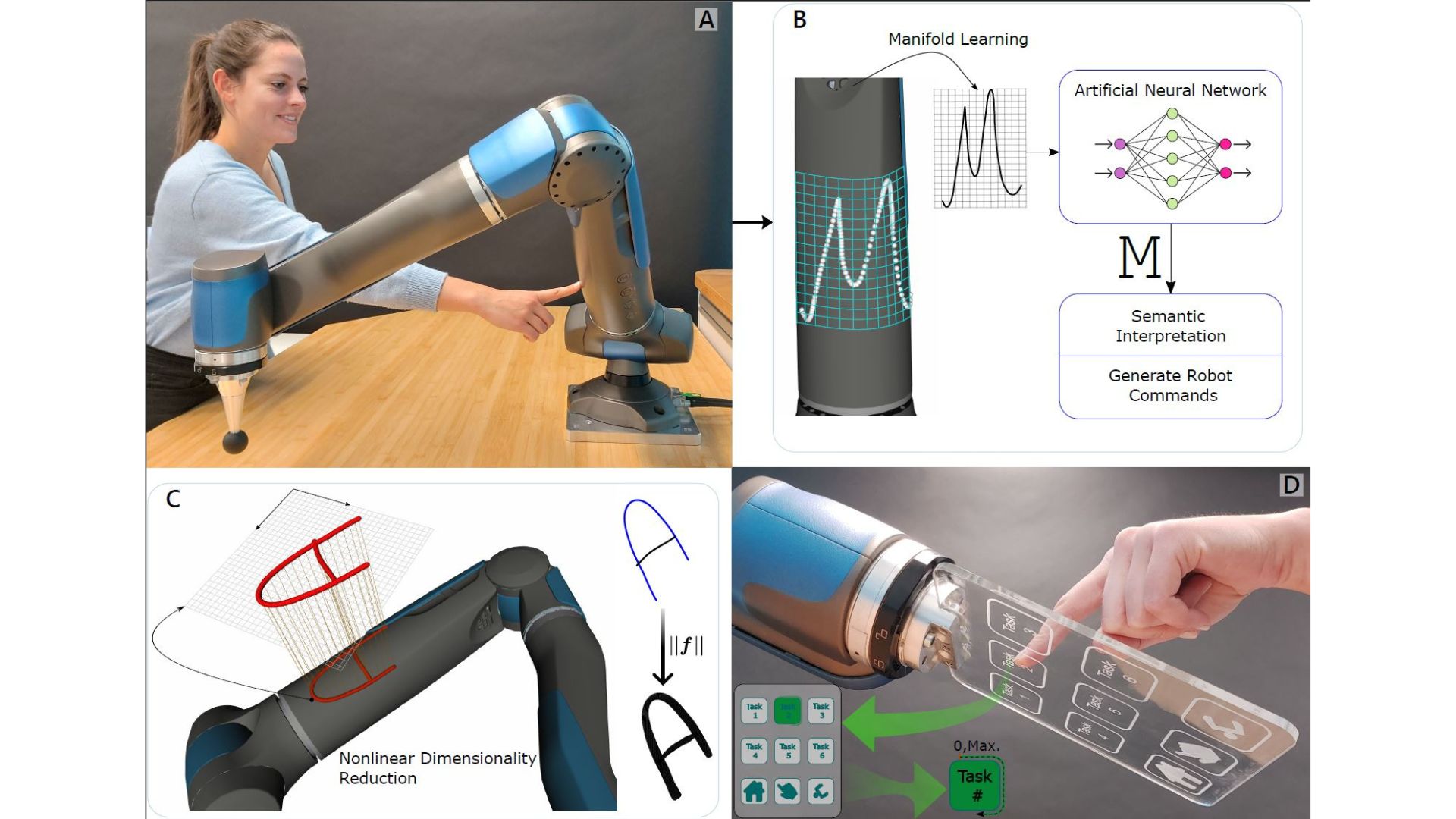
آنها مشکلات را با استفاده از تجهیزات موجود در سیستم دستیار رباتیک ایمن (SARA) که یک بازوی رباتیک با حسگرهای نیرویی در مفاصل و پایه آن است، که موقعیت و حرکت مستقیم را شناسایی میکنند، برطرف کردند.
این امکان را به ربات میدهد تا تماسهای فیزیکی را بدون نیاز به حسگرهای خارجی لمس کند و به آنها پاسخ دهد. با استفاده از حسگرها، ربات میتواند شناسایی کند که در کجا و به چه ترتیبی نیروهای مختلف به سطح آن وارد شدهاند.
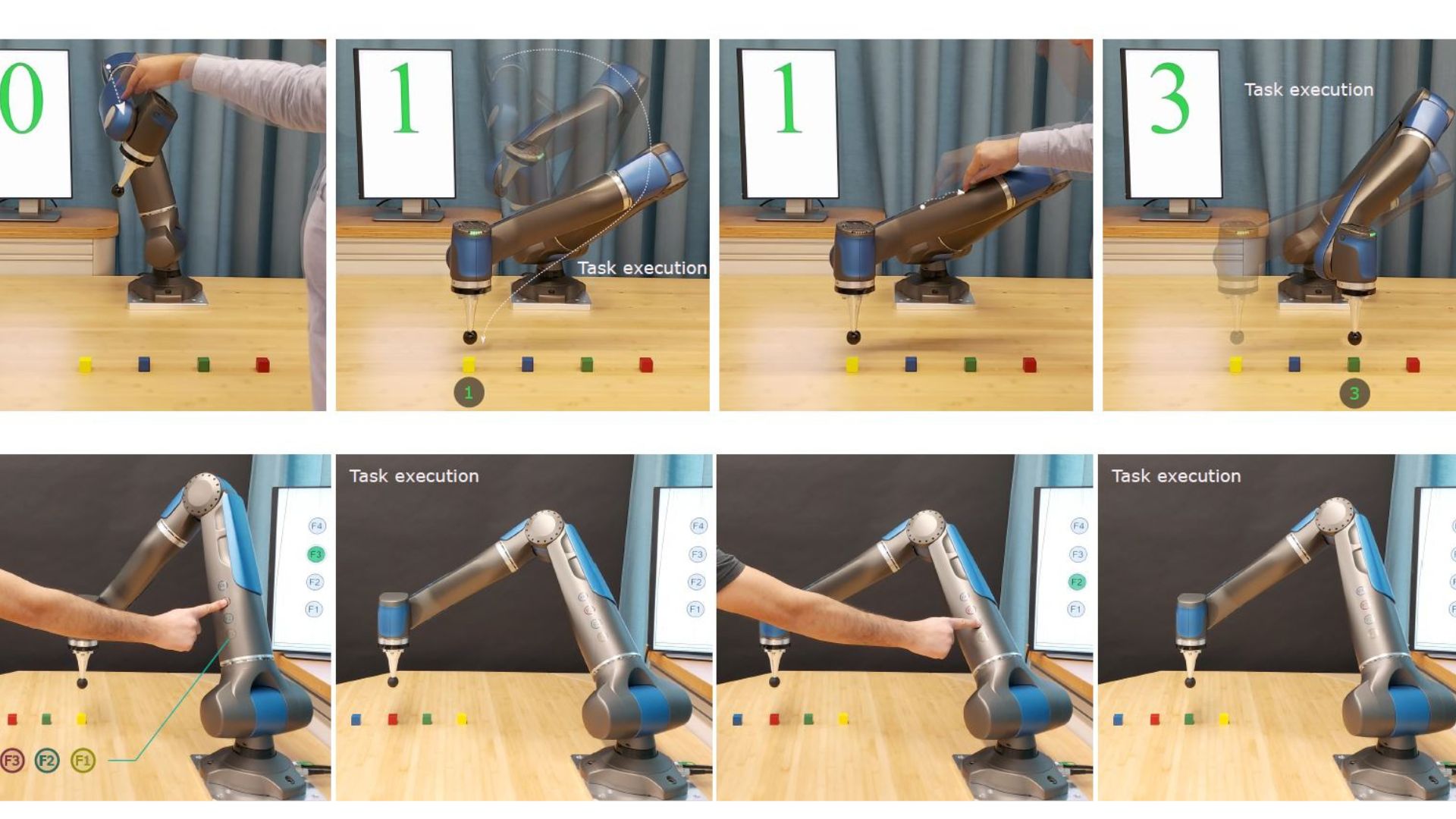
آنها این قابلیت را با الگوریتمهای یادگیری عمیق ترکیب کرده و سپس لمس اعمال شده را تفسیر میکنند. آنها نشان دادند که ربات میتواند اعداد یا حروفی که روی سطح آن نوشته شدهاند را با استفاده از شبکههای عصبی پیشبینی کند.
تیم همچنین این مکانیزم را برای شامل «دکمههای» مجازی یا لغزندهها روی سطوح ربات، که میتوانند برای فعال کردن دستورات یا حرکات خاص استفاده شوند، بسط دادند.
محققان ادعا میکنند که این روش سیستم را با حس لمسی شهودی و دقیق مجهز کرده و دامنه تعاملات فیزیکی انسان-ربات ممکن را افزایش میدهد.
تیم در این مطالعه گفت: «حس لمس ذاتی که در این کار پیشنهاد کردهایم، میتواند پایهای برای دستهای پیشرفتهتر از تعامل فیزیکی انسان-ربات باشد که تاکنون ممکن نبوده است و امکان تغییر از حالتهای معمول به سمت سازگاری، انعطاف و کنترل شهودی را فراهم میکند.»
جزئیات پژوهش تیم در نشریه Science Robotics منتشر شد.



