
ربات شناگر نرم سریع با الهام از سفرهماهی که به سرعت ۶.۸ برابر طول بدن بر ثانیه میرسد
محققان رکورد جدیدی برای سریعترین ربات شناگر نرم inspired by manta rays برای کنترل حرکت بهتر، به ثبت رساندهاند.
تیمی در دانشگاه ایالت کارولینای شمالی (NC State) طراحی قبلی ربات نرم آبزی خود را بهبود بخشیده و سرعت آن را از 3.74 به 6.8 برابر طول بدن در ثانیه افزایش دادهاست.
طراحی جدید انرژی کارآمدتر است و قادر است در تمام ستون آب شنا کند، در حالی که مدل قبلی تنها به شنا در سطح محدود بود.
محققان در بیانیهای گفتند: «مطالعه دینامیک سیالات سفرهماهیها نیز نقش کلیدی در کنترل حرکت عمودی ربات نرم ایفا کردهاست.»
شنا ربات نرم
ربات نرم دارای بالههایی الهام گرفته از سفرهماهی و ساخته شده از مادهای است که در حالتی پایدار باقی میماند هنگامی که بالهها به طور گسترده باز شدهاند.
بالهها به بدنه سیلیکونی انعطافپذیر متصل هستند و به اتاقکی پر از هوا متصل میشوند. با باد کردن اتاقک، بالهها خم میشوند و حرکت سکته به پایین باله سفرهماهی را شبیهسازی میکنند.
هنگامی که هوا آزاد میشود، بالهها به موقعیت ابتدایی خود برمیگردند. به گفته محققان، این مکانیسم امکان ذخیره انرژی در سیستم را فراهم میکند و بالهها پس از آزادسازی هوا به وضعیت پایدار خود باز میگردند و بدین ترتیب باعث عمل فعالسازی سریع با تنها یک محرک میشوند.
دینامیک سیالات سفرهماهیها بر توانایی طراحی برای کنترل حرکت عمودی تأثیرگذار است. با مطالعه حرکت شنا این موجودات، محققان این رفتارها را شبیهسازی کردند تا به ربات امکان دهند که به بالا، پایین شنا کند یا در ستون آب موقعیت خود را حفظ کند.
سفرهماهیها دو جریان آب تولید میکنند تا خود را به جلو برانند و با تغییر حرکت شنایشان مسیر خود را تغییر دهند. تکنیکی مشابه در ربات جهت کنترل حرکتهای عمودیاش استفاده شده است که باعث بهبود توانایی آن برای حرکت در آب میشود.
تیم همچنان در حال بهبود روشها برای تنظیم بهتر حرکتهای جانبی ربات، با هدف بهبود کنترل کلی و تطبیقپذیری آن در محیطهای آبی است.
ربات استادی بیوزنی
شبیهسازیها و آزمایشها نشان دادهاند که جریان پایینرو ربات نرم قدرتمندتر از جریان بالارو آن است. زمانی که ربات بالههای خود را به سرعت تکان میدهد، بالا میرود، اما کاهش فرکانس عمل فعالسازی به آن امکان میدهد که بین تکانها کمی شناور شود، که باعث میشود بتواند به زیر سطح برود یا عمق خود را حفظ کند.
استفاده از هوای فشرده در ربات نیز بر بیوزنی تأثیر میگذارد. وقتی بالهها در حال استراحت هستند، اتاقک هوا خالی است و بیوزنی کاهش مییابد. با این حال، زمانی که ربات بالههای خود را به سرعت تکان میدهد، اتاقک به طور مکرر پر میشود و بیوزنی افزایش مییابد.
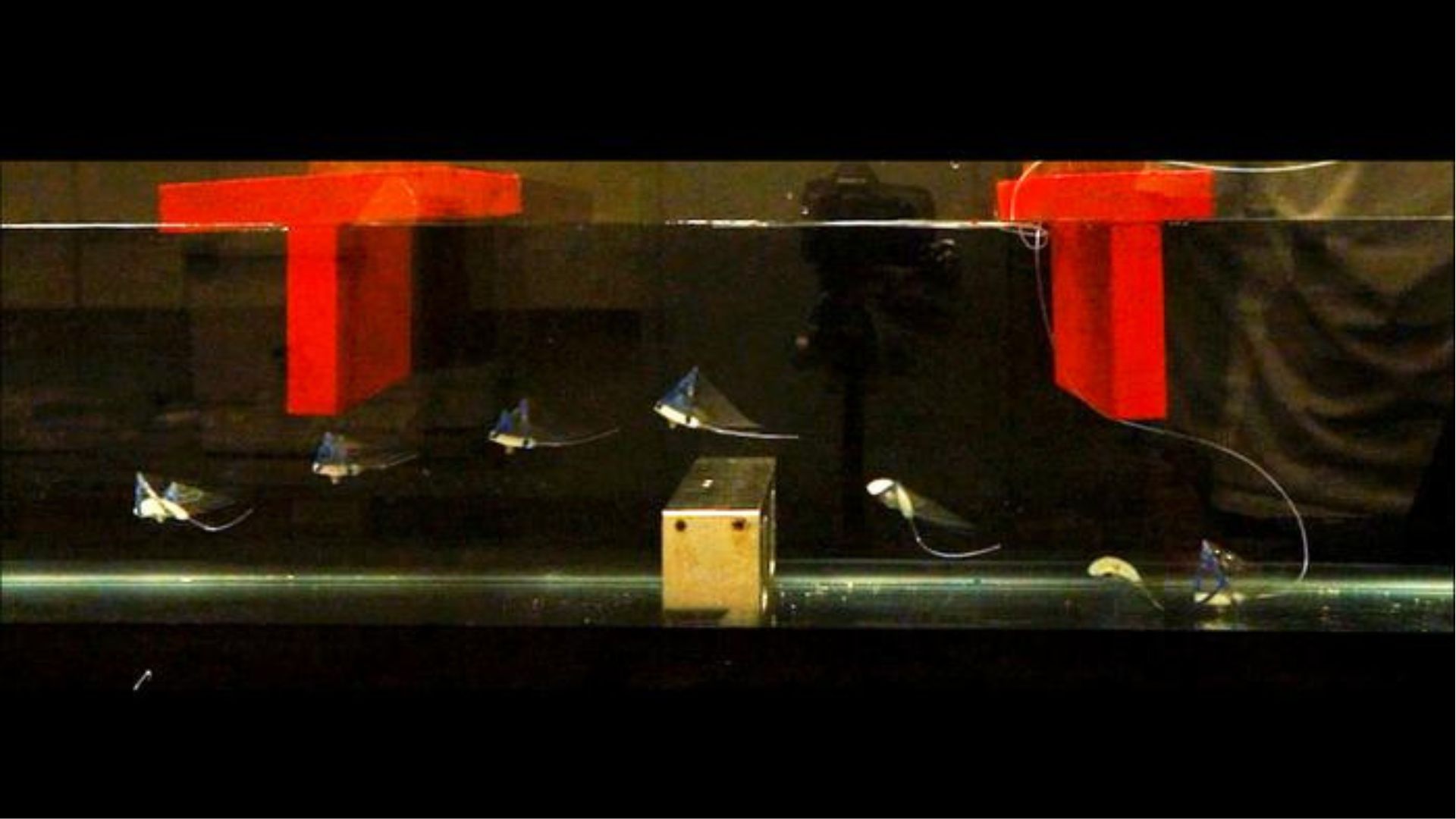
تواناییهای ربات به دو روش به نمایش گذاشته شدند: یک تکرار مسیری از موانع را در سطح و کف تانک آب طی کرد، در حالی که نسخه بینخ توانست یک محموله، شامل هوای خود و منبع برق، را روی سطح حمل کند.
با وجود طراحی پیچیده آن، اصول بنیادی ساده هستند. تنها با یک ورودی محرک، ربات میتواند محیط عمودی را به طور مؤثر پیمایش کند.
به گفته تیم، این نشاندهنده تطبیقپذیری و کارایی ربات نرم است که برای انجام چالشها و وظایف زیرآبی مختلف با کمترین مصرف انرژی و سیستم کنترل ساده طراحی شدهاست.
“ما در حال حاضر روی بهبود حرکت جانبی و کاوش در حالتهای دیگر عملگرایی کار میکنیم که به طور چشمگیری تواناییهای این سیستم را افزایش خواهد داد. هدف ما این است که این کار را با طراحی که آن سادگی برازنده را حفظ کند انجام دهیم،” گفت جیه یین، استادیار مهندسی مکانیک و هوا-فضا در NC State و نویسنده مشترک مقاله پژوهشی، در یک بیانیه .
جزئیات پژوهش تیم در مجله Science Advances منتشر شد.



