روبات جدید گوگل دیپمایند با انسانها تنیس روی میز بازی میکند؛ نوبت پیشتازی در جهان واقعی است؟
به گزارش پیوست، فعالیت در جهان واقعی شاید از جمله اولین اهداف شرکتهای فناوری بود و سالها پیش جهان امروز به گونهای تصور میشد که روباتها بیشتر کارهای سنگین را برعهده میگیرند و انسانها بیشتر از قدرت ذهن خود برای خلاقت و نوآوری استفاده میکنند.
با این حال تاریخ به گونه دیگری رقم خورد و اول از همه این وظایف سفید و غیر فیزیکی بودند که در خطر خودکارسازی قرار گرفتند و هنوز با روبات انساننمای همه کاره که به خوبی وظایف فیزیکی را برعهده بگیرد فاصله داریم و معمولا این فناوری تنها روی کارهای بدون تغییر و تکراری تمرکز دارد.
گزارشی از MIT Technology Review خبر روبات جدیدی از گوگل دیپمایند، واحد هوش مصنوعی گوگل، را منتشر کرده است که در سطح یک بازیکن آماتور با انسانها رقابت میکند و میتواند تعداد زیادی از بازیکنان معمولی را شکست دهد. هوش مصنوعی در جهان کامپیوتر و بازیهای دشوار غیرفیزیکی همچون گو با اختلاف گوی سبقت را انسانها ربوده است (با استفاده از سیستم AlphaGo که آنهم توسط دیپمایند طراحی شده است) و با موج جدید این فناوری شاهد عملکرد جالب توجه آنها در وظایفی مثل ترجمه و کدنویسی هستیم.
به گزارش پیوست، فعالیت در جهان واقعی شاید از جمله اولین اهداف شرکتهای فناوری بود و سالها پیش جهان امروز به گونهای تصور میشد که روباتها بیشتر کارهای سنگین را برعهده میگیرند و انسانها بیشتر از قدرت ذهن خود برای خلاقت و نوآوری استفاده میکنند.
با این حال تاریخ به گونه دیگری رقم خورد و اول از همه این وظایف سفید و غیر فیزیکی بودند که در خطر خودکارسازی قرار گرفتند و هنوز با روبات انساننمای همه کاره که به خوبی وظایف فیزیکی را برعهده بگیرد فاصله داریم و معمولا این فناوری تنها روی کارهای بدون تغییر و تکراری تمرکز دارد. با این حال بخش هوش مصنوعی گوگل و چند شرکت دیگر به نظر در تلاش هستند تا شرایط را در این حوزه نیز تغییر دهند. هوش مصنوعی و الگوریتمها به روباتها در جهان واقعی کمک میکنند.
بازوی روباتیک گوگل گامی در مسیر روباتهای فعال و کاربردی
پژوهشگران گوگل با طراحی جدید خود به نظر گامی برای تغییر شرایط برداشتهاند و با اینکه این روبات وظیفه خاصی را هدف نگرفته است اما میتواند در یک بازی فیزیکی (تنیس روی میز) که نیازمند واکنش لحظهای است مقابل انسان بایستد.
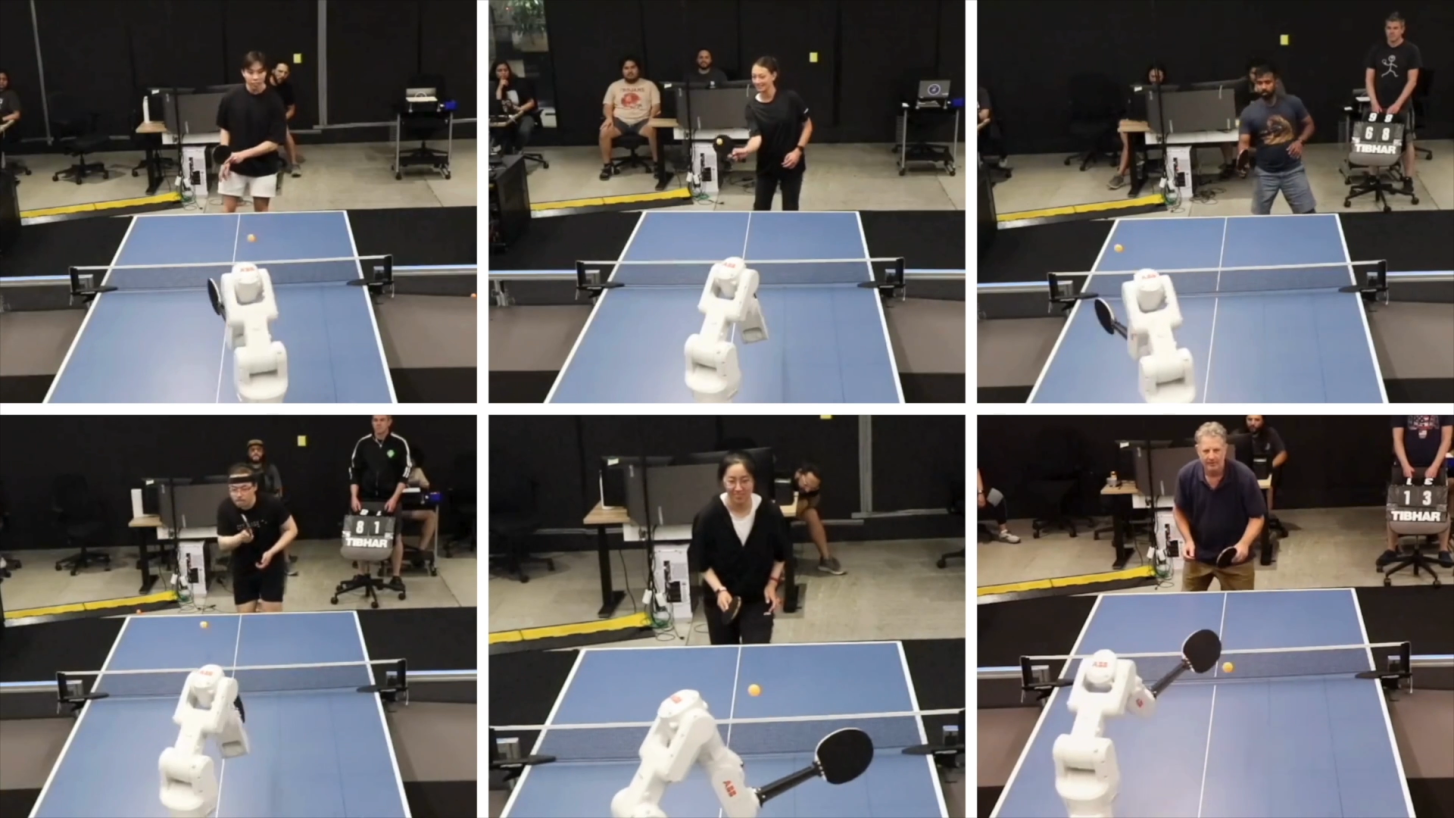
بازوی روباتیک طراحی شده توسط پژوهشگران گوگل توانسته است در ۲۹ بازی در مقابل انسانهایی با مهارت مختلف به ۱۳ پیروزی دست پیدا کند. با این حال محققان میگویند آنچه در این آزمایش شاهد بودیم تنها محدود به یک بازی ساده نیست و پلهای است برای حرکت به سمت افزایش قدرت تعامل و آگاهی محیطی روباتها.
این سیستم هنوز فاصله بسیاری با سطح ایدهآل دارد. اگرچه روبات تنیسباز توانست تمام رقبای تازهکار و ۵۵ درصد از آنهایی که در سطح آماتور فعالیت داشتند را شکست دهد، اما در تمام بازیها علیه بازیکنان حرفهای شکست خورد. با این حال همین نتایج نیز جالب توجه است.
پاناگ سانکتی، یکی از مهندسان ارشد گوگل دیپمایند که رهبری این پروژه را برعهده دارد میگوید: «حتی چند ما قبل، پیشبینی واقعگرایانه ما این بود که شاید روبات نتواند در مقابل افرادی که پیشتر مقابلشان بازی نکرده به پیروزی برسد. این سیستم به روشنی از انتظارات ما فراتر رفت.»
اما این تحقیقات تنها با هدف بازی و سرگرمی نیست. در واقع این روبات گامی است در مسیر ساخت روباتهایی که میتوانند با مهارت و امن در محیطهای واقعی مثل خانه و انبار به فعالیت بپردازند که از اهداف دیرینه جامعه روباتیک به حساب میآید. لرل پینتو، پژوهشگر علوم کامپیوتر در دانشگاه نیویورک که البته فعالیتی در این پروژه نداشته است، میگیود رویکرد گوگل دیپمایند به آموزش این ماشینها را میتوان در دیگر زمینههای این رشته استفاده کرد.
او میگوید: «من خیلی مشتاق دیدن روباتهایی هستم که بتوانند با انسانهای واقعی و کنار آنها کار کنند و این مثال فوقالعادهای از چنین چیزی است. شاید یک بازیکن قدرتمند نباشد، اما در اینجا مواد خامی داریم که میتوان پیشرفتشان داد و به آن مرحله رسید.»
روبات گوگل با یک رویکرد دوبخشی در حین بازی و با تکرار پیشرفت میکند
انسانها برای تبدیل شدن به یک بازیکن خوب در تنیس روی میز به هماهنگی بالای دست و چشم، حرکت سریع و واکنش فوری به حریف نیاز دارند که همگی اینها برای روباتها بسیار دشوار است. محققان گوگل دیپمایند با یک رویکرد دوبخشی این سیستم را برای یادگیری این مهارتها آموزش دادند: آنها از شبیهسازیهای کامپیوتری برای آموزش روبات و یادگیری مهارتهای ضربه زدن استفاده کردند و سپس با دادههای جهان واقعی، روبات توانست خود را به مرور تقویت کند.
محققان برای این کار دیتاستی از حالتهای توپ در تنیس روی میز را گردآوری کردند که حالت، چرخش و سرعت توپ را شامل میشد. این سیستم در محیط شبیهسازی شده که براساس مسابقات واقعی تنیس روی میز طراحی شده بود، آموزش دید تا مهارتهایی مثل پاسخ به سرویس، ضربه فورهند چرخشی یا ضربه بکهند را یاد بگیرد. با توجه به محدودیتها، این روبات قادر به ضربه سرویس نبود و بازیها براساس این موضوع تنظیم شدند.
روبات در طول مسابقات خود با انسانها دادههایی را جمعآوری و از آن برای تقویت خود استفاده میکند. روبات جایگاه توپ را با استفاده از دادههای یک جفت دوربین ردیابی میکند و براساس یک سیستم ثبت حرکت که از LED روی دسته حریف تشکیل شده است، سبک بازی حریف انسانی را دنبال میکند. دادههای توپ برای آموزش دوباره در شبیهسازی تزریق میشوند و یک حلقه بازخوردی مداوم را داریم.
چنین بازخوردی به روبات اجازه میدهد تا مهارتهای تازه را در تلاش برای شکست حریف امتحان کند و درست همچون انسانها تاکتیک و رفتار خود را تغییر دهد. درنتیجه روبات در طول یک مسابقه بهتر و بهتر میشود و با بازی بیشتر، مهارت بیشتری کسب میکند.
با این حال سیستم در پاسخ به ضربههایی که بسیار پرقدرت، خارج از میدان دید (بیش از شش فوت بالای میز) یا بسیار پایین بودند به مشکل میخورد زیرا براساس پروتکل موجود این روبات باید از برخورد دسته به میز و احتمال خرابی آن اجتناب کند. ضربات چرخشی هم به نظر برای روبات دشوار بود زیرا امکان سنجش مستقیم چرخش را ندارد و بازیکنان حرفهای خیلی سریع از این مساله سو استفاده میکنند.
شبیهسازی دقیق جهان واقعی از جمله مهمترین چالشهای روباتیک
کریس والتی، بنیانگذار شرکت روباتیک Mytra که پیشتر رهبری تیم روباتیک تسلا را برعهده داشته است، میگوید آموزش یک روبات برای تمام احتمالات در محیط شبیهسازی شده بسیار دشوار است.
او میگوید: «شبیه سازی دقیق جهان واقعی بسیار بسیار دشوار است زیرا متغییرهای بسیاری مثل باد یا حتی گرد و خاک [روی میز] وجود دارند. اگر شبیهسازیهای بسیار واقعی نداشته باشید، عملکرد روبات محدود میشود.»
گوگل دیپمایند میگوید به چند طریق از جمله با مدلهای هوش مصنوعی پیشگویانه که برای پیشبینی موقعیت توپ طراحی میشوند و استفاده از الگوریتمهای بهتر برای تشخیص ضربه، میتواند این محدودیتها را برطرف کند.
گفتنی است که بازیکنان انسانی از بازی در مقابل روبات لذت برده و میگویند بسیار فعال و تعاملی است و این پتانسیل را دارد که در آینده به بهبود مهارتهای آنها کمک کند.
شرکتهای روباتیک مختلفی در حال حاضر در حال توسعه روباتهای انساننما هستند که از جمله مهمترین آنها میتوان به تسلا، شرکت تحت رهبری ایلان ماسک، اشاره کرد که در صورت تحقق اهدافش قرار است تا سال ۲۰۲۶ روبات انساننمای خود را به تولید عمده برساند. شرکت بوستون داینامیک نیز از جمله دیگر فعالان موفق این حوزه است که با روباتهای مختلف توجه بسیاری از مردم را به خود و آینده این فناوری جلب کرده است.