
مدل سهبعدی و قابل سوار شدن AT-AT از جنگ ستارگان به زندگی واقعی آمد
یک مخترع مدل سهبعدی و قابل سوار شدن AT-AT از جنگ ستارگان ساخته است.
در یک ویدیو که توسط جیمز بروتون در یوتیوب منتشر شده، سازنده در مورد توسعه مدل قابل سوار شدن AT-AT صحبت میکند، که قبلاً نسخه کوچکتر آن را با استفاده از چاپ سهبعدی و سروموتورها برای حرکت ساخته بود.
نسخه بزرگتر از براکتهای فلزی اکستروژن و قطعات سهبعدی چاپ شده ضخیمتر که توسط موتورهای برسدار قدرت گرفتهاند، استفاده میکند.
پاها دارای مکانیسم بازخورد با پتانسیومترها برای سنجش موقعیت هستند که آنها را به سروموتورهایی برای کنترل دقیق تبدیل میکند.
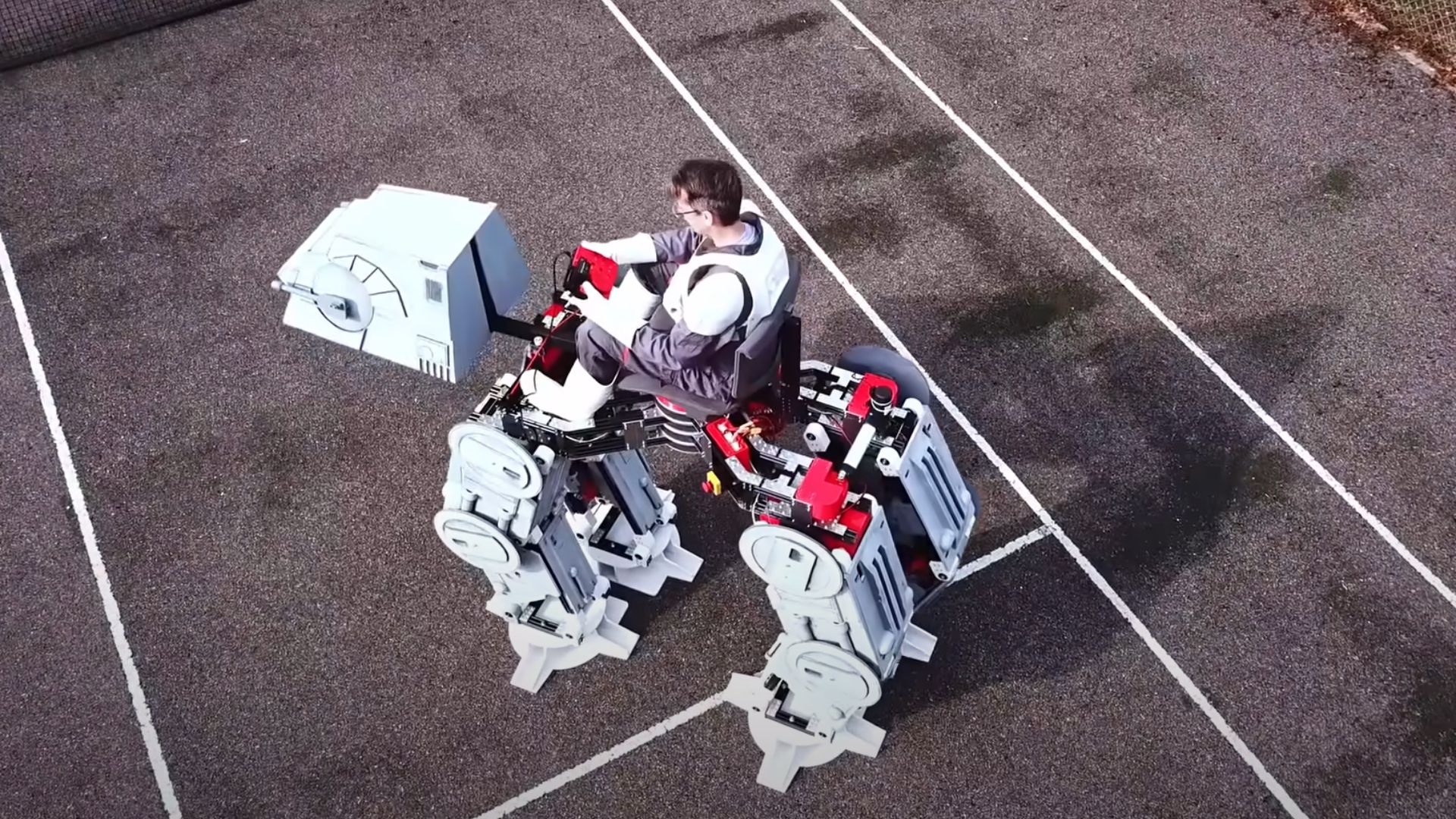
مدل بزرگ AT-AT
در جنگ ستارگان ، AT-AT یک وسیله نقلیه چهارپا است که توسط ارتش امپراتوری استفاده میشود. این وسیله بیش از ۲۰ متر بلند است و زره قوی دارد که میتواند مقابل انفجارها مقاومت کند. در نبرد هاث، لوک و تیم خلبانیاش مجبور بودند تا از راههای هوشمندانهای برای سرنگون کردن این ماشینهای غولپیکر استفاده کنند.
در این پروژه، سازنده قصد دارد نسخه بزرگتری از AT-AT بسازد که بزرگ و قابل سوار شدن باشد. او پیشتر نسخه کوچکتری را با استفاده از چاپ سهبعدی و سروموتورهای رادیوکنترلی برای حرکت پاها ساخته بود.
این نسخه قبلی دارای چیدمان دندهی منحصر به فرد برای حرکت پاها بود و حتی میتوانست در محل خودش با چرخاندن پاها به خارج بچرخد.
اما ساخت این مدل بزرگتر شامل اکستروژن فلز، براکتهای فلزی و قطعات سهبعدی چاپ شده بزرگتر است. چیدمان دندهها همان است، اما به جای سروموتورها، مدل بزرگتر از موتورهای برسدار با سر دندهها برای قدرت بخشیدن به پاها استفاده میکند.
این پاها به قدر کافی قوی هستند تا وزن سازنده را بدون دردسر نگه دارند و بلند کنند. در حالی که مدل کوچکتر از سروموتورهای رادیویی با توانایی موقعیتیابی دقیق از طریق سیگنالهای PWM استفاده میکرد، مدل بزرگتر تنها از موتورهای DC استفاده میکند که فاقد بازخورد موقعیتی هستند.
به گفته بروتون، این محدودیت چالشی برای کنترل حرکتهای واکر ارائه میکند که نیاز به تعدیلات بیشتری دارد.
پلتفرم رباتیک پایدار
ویدیو نمایش دهنده تجمع و آزمایش شاسی رباتیکی است که مجهز به چندین Lazy Susan و صفحات آلومینیومی است. این تنظیمات، طراحی شده تا حرکت پاها را تسهیل کند، دارای ساختار مقاومی از صفحات آلومینیومی ۶ میلیمتری است که به فریم اکستروژن محکم وصل شدهاند.
طراحی نوآورانه شامل چندین لایه بود که Lazy Susan های اضافی برای چرخش را داشت، که به استحکام و کارایی شاسی افزود.
برای بلند کردن این مجموعه بزرگ، سازنده از میز ایستاده FlexiSpot E7 Pro به عنوان جرثقیل استفاده کرد که به همترازی دقیق و پیچ کردن پاها بدون خطر آسیب یا دشواری مرتبط با بلند کردن دستی، کمک کرد.
به گفته بروتون، پس از تجمع، شاسی نتایج امیدوارکنندهای را در حین کار نشان داد، که انعطافپذیری کمی داشت اما در حین عملیاتی باقی ماند.
در حین آزمایش، شاسی رباتیک توالی قدمزنی را اجرا کرد و با موفقیت سازنده را بدون واژگون شدن حمل کرد. آزمایش کارایی چرخدندههای سهبعدی چاپ شده و استحکام کلی طراحی را نمایش داد، با شاسی که با سرعت ۱ متر در ثانیه حرکت میکند.
سازنده از پتانسیل این پروژه ابراز هیجان کرد و به بهبودهای آینده که ممکن است شامل افزایش سرعت و افزودن ویژگیهای جدید باشد اشاره کرد. FlexiSpot از این پروژه حمایت کرد و راهکارهای ارگونومیک که به فرآیند تجمع کمک کرد، فراهم نمود.
در همین حال، سازنده از بینندگان خواسته تا با پیشنهاد دادن بهبودهای بیشتر در نظرات، در ارتقای طراحی AT-AT واکر کمک کنند.



