
پژوهشگران آمریکایی ربات همهجانبهای با چرخهای سیکلوئیدی برای هر نوع هوایی توسعه دادند
پژوهشگران دانشگاه تگزاس A&M رباتی با چرخهای سیکلوئیدی ایجاد کردهاند که نشاندهنده پیشرفتی مهم در استفاده از رباتیک در محیطهای همهجانبه است.
آزمایشگاه فناوری و رباتیک تطبیقی در دانشکده فناوری مهندسی و توزیع صنعتی، CLAW (چرخ تقویتشده سیکلوئیدی) را توسعه داده است که جدیدترین دستاورد آنهاست.
این سیستم منحصربهفرد، به ربات این امکان را میدهد تا در هنگام حرکت روی سطوح صاف، هموار حرکت کرده و به راحتی به حالت صعود برای گذر از موانع تبدیل شود.
ترکیبات شبیه به پنجه چرخ به هنگام نزدیک شدن به سطح، بالا میآیند و جمع میشوند تا تماس مداوم را تضمین کنند.
ربات همهجانبه
دکتر کیجو لی، استادیار در دانشکده فناوری مهندسی و توزیع صنعتی، و جی مایک واکر، '۶۶، دانشکده مهندسی مکانیک، همراه با دانشجوی دکتری مهندسی مکانیک یوآن وی، CLAW را توسعه دادند.
تیم تحقیقاتی لی ربات قابل تغییر چرخ و پاها (α-WaLTR) را برای پروژهای بودجهدار از DARPA از سال ۲۰۲۰ تا ۲۰۲۱ توسعه دادند.
α-WaLTR میتواند بدون یا با کمک انسان از سطوح مختلف، مانند پلهها، عبور کند و از چرخها یا پاها به عنوان نیاز استفاده کند. لی α-WaLTR را برای بهبود حرکت زمینی در رباتها ایجاد کرد.
برخلاف α-WaLTR که بین چرخها و پاها جایگزین میشود، مکانیزم CLAW ممکن است برای رباتهای ردیابی یا رباتهای چرخدار سنتی تطبیق یابد.
موسسه ملی غذا و کشاورزی USDA تحقیق را از طریق ابتکار رباتیک ملی ۳٫۰ تأمین مالی کرده است که در اصل بر توسعه یک سیستم روبوتیک مقیاسپذیر و تطبیقپذیر برای موقعیتهای کشاورزی مختلف متمرکز بود.
با استفاده از CLAW، این رباتها میتوانند به تنوعات جغرافیایی و شرایط آب و هوایی یک میدان کشاورزی پاسخ دهند.
CLAW برای رسیدن به ارتفاعات گسترش مییابد و هنگامی که به زمین نزدیک میشود، جمع میشود تا چرخ همواره با سطح تماس داشته باشد.
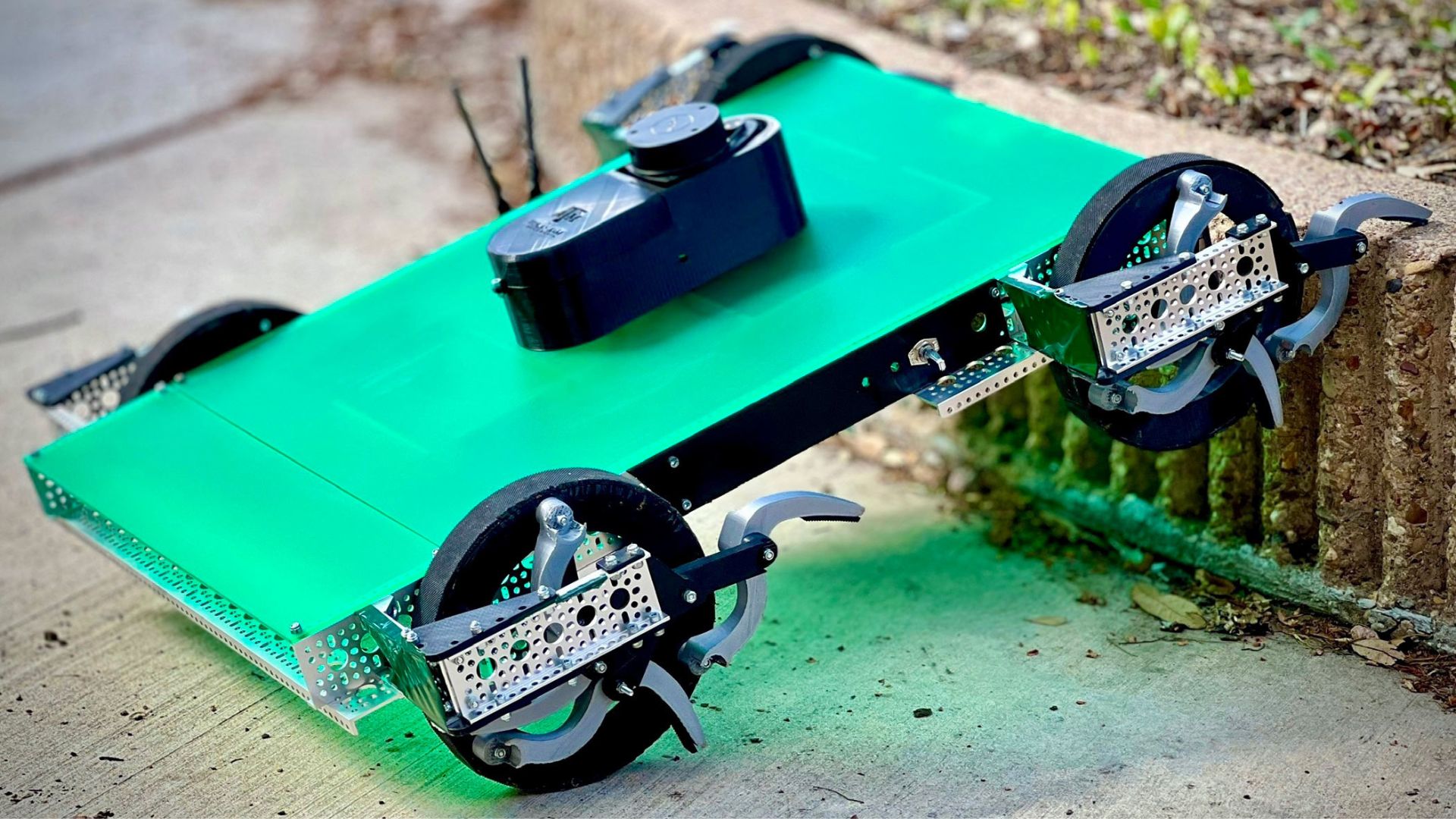
ربات چهار چرخ
طراحی ممکن است استفاده از رباتها در عملیات جستجو و نجات، واکنش به بلایا و مأموریتهای نظامی را گسترش دهد. والدین وی که هر دو پزشک هستند، کاربردهای بالقوهای در ویلچرها دیدهاند.
لی و وی CLAWbot را ساختند، رباتی با محور ثابت و چهار چرخ با طراحی جدید برای آزمایش CLAW.
ربات قابلیت حرکت بر روی سطوح مختلف و همچنین صعود به موانع و پلهها را بهصورت قابل اعتماد نشان داد. CLAWbot بر روی تحقیقات قبلی در کنترل رباتهای چرخدار، موقعیتیابی و ناوبری بنا شده است و چارچوبی محکم برای توسعه قابلیتهای خودکار فراهم میکند.
طراحی به تازگی در IEEE/ASME Transactions on Mechatronics منتشر شده است و پروژه دارای اختراع پروویژنال است.
لی میگوید: «نوآوری محور طراحی منبع اصلی الهام آزمایشگاه فناوری و رباتیک تطبیقی است. مکانیزم CLAW نشان میدهد که چگونه طراحی مکانیکی جدید میتواند چالش پیچیده دستیابی به تحرک چندگانه در رباتهای متحرک را حل کند.»
چرخهای سیکلوئیدی
CLAW سه بخش پا را با یک چرخ ادغام میکند و از مکانیزم میلهای منفعل مخصوصی که از طراحی روتور سیکلوئیدی الهام گرفته شده استفاده میکند.
این پاها به صورت بیرونی برای رسیدن به ارتفاعات از جبهه گسترش مییابند و به عنوان که به زمین نزدیک میشوند درون مرز چرخ جمع میشوند.
این تکنیک نوآورانه اجازه میدهد تا پاها در حالی که چرخ میچرخد، بدون نیاز به محرکهای اضافی، مسیرهای سیکلوئیدی را تشکیل دهند، و در عین حال سادگی عملکرد و کنترل رباتهای چرخدار سنتی را حفظ کرده و به طور قابل توجهی قابلیتهای صعود را بهبود میبخشد.
آزمایشات تجربی با CLAWbot، ربات چهار چرخ با محور ثابت مجهز به مکانیسمهای CLAW، صعود از موانع تا ۲٫۶ برابر شعاع چرخ و عبور قابل اعتماد از پلهها، موانع و زمینهای مختلف، مانند یک کف بتنی، چمن، رمپ و سطوح سنگی را نشان داد.
همچنین در طی چرخشها و صعودهای خود مسیرهای هموار را نشان داد.



