ربات انساننمای Torobo به دقت میخ را میکوبد، نشاندهنده پتانسیل برای استفاده صنعتی
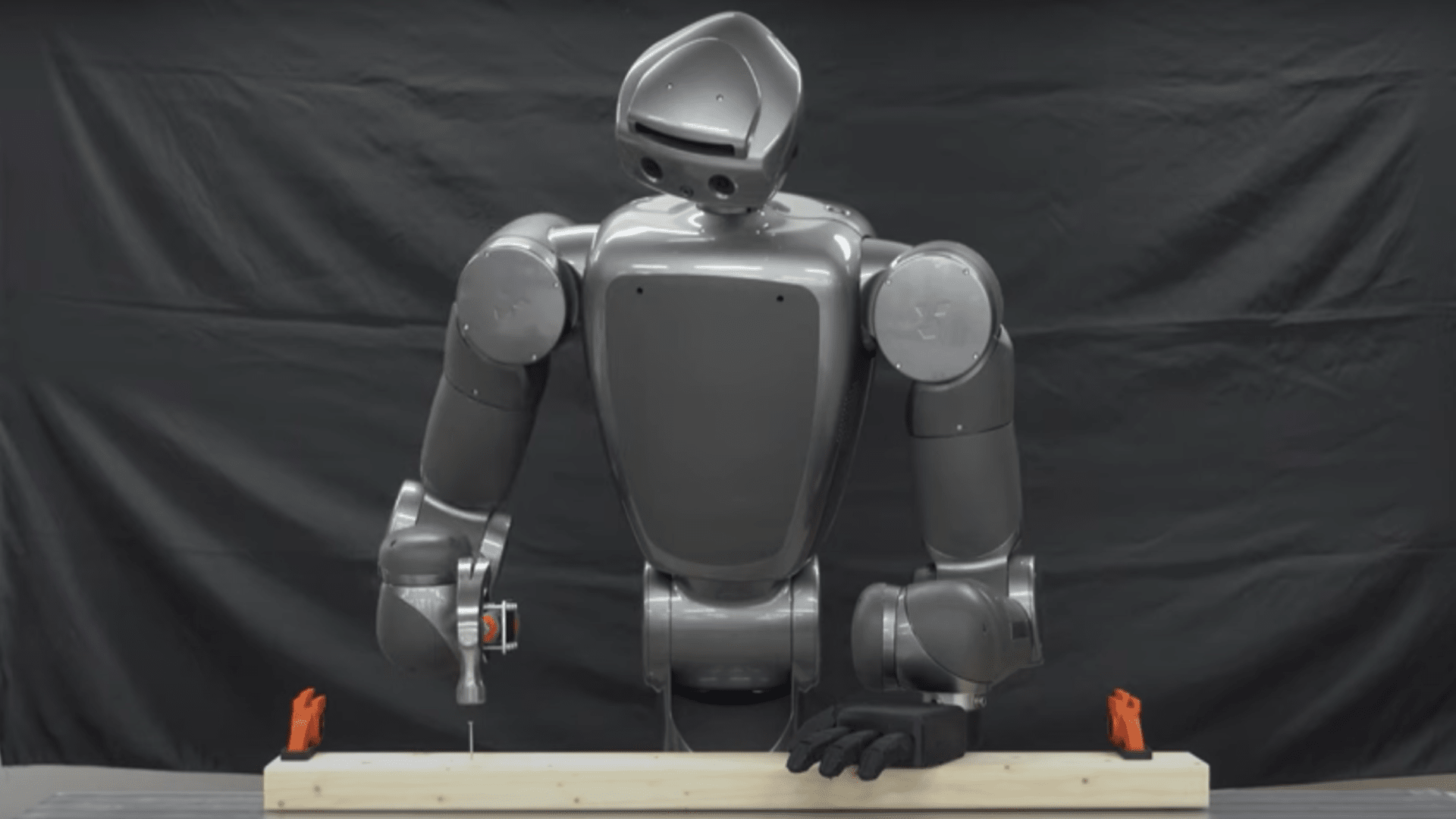
ربات انساننمایی که توسط Tokyo Robotics توسعه یافته است، در یک ویدئو جدید دیده میشود که به دقت در حال کوبیدن میخی به تکهای چوب است. این تلاش هماهنگ و دقیق توسط Torobo نشاندهنده پتانسیل آن برای استفادههای صنعتی است، به گفته تولید کننده.
با ارتفاع 1660 میلیمتر و برد 680 میلیمتر، اندازه این ربات به اندازه انسانها نزدیک است. به گفته شرکت، بار یکی از بازوها در بدترین حالت ممکن 8 کیلوگرم است و در نیروی حداکثر لحظهای (هنگامی که آرنج به راستای قائم خم شده است) 20 کیلوگرم است که برای انجام تحقیقات رباتیک برای جایگزینی کار انسانی کافی است.
شرکت اعلام کرده است که عملکرد انجام شده توسط ربات آسانتر از آن چیزی است که به نظر میرسد.
«نیروی برگشت لحظهای از چکش از طریق ترکیبی از خاصیت الاستیسیته مواد لاستیکی که چکش را نگه میدارد، انحراف در حسگرهای گشتاور و دندههای هماهنگ، قابلیت بازگشت به عقب و کنترل امپدانس جذب میشود»، گفت Tokyo Robotics.
«این امکان را میدهد که میخ با نیروی معینی کوبیده شود.»
اجرای وظایف کنترل نیرویی
مجهز به سنسورهای گشتاور در تمام مفاصل بازوها و کمر، کنترل گشتاور مفصلها امکان توقف تماسهای ایمن و اجرای وظایف کنترل نیرویی را میدهد. وظایف مونتاژ، پخت و پز، و تعامل فیزیکی با انسانها میتوانند با ایمنی و مهارت بیشتری انجام شوند، به گفته شرکت.
Tokyo Robotics همچنین اعلام کرده است که پیکربندی مفاصل بازوهای دوتایی 7 محوره، کمر 3 محوره (قدم، قدم، انحراف)، گردن 3 محوره (انحراف، قدم، چرخش)، و 4 محور زیرین (پایه متحرک همهجهتی) امکان انجام وظایفی با محدوده حرکتی مشابه انسانها در فضاهای زندگی و کاری افراد را میدهد.
Torobo میتواند برای تحقیقات در مورد اتوماسیون وظایف استفاده شود
توسعه یافته برای تسریع تحقیقات در مورد کاربردهای صنعتی رباتهای انساننمای تمامبدن، Torobo میتواند برای تحقیقات در مورد اتوماسیون وظایف که شامل تماس فعال با افراد، محیط و اشیاء میشود، تحقیقات در مورد کاربردهای نسل بعدی رباتهای دوتایی با کنترل نیرو و تحقیقات در مورد استفاده از یادگیری ماشین در رباتها مورد استفاده قرار گیرد.
Torobo میتواند از کنترل امپدانس در سیستم مختصات کارتزین، پیشگیری از افتادن با مانیتورینگ ZMP، یک ماشین حالت برای اتصال حرکات متعدد و توقف ایمنی بر اساس تشخیص تداخل استفاده کند.
نرمافزار Torobo بر اساس ROS است و بنابراین علاوه بر استفاده آسان از توابع فوق، تجسم وضعیت با RViz، برنامهریزی مسیر با استفاده از نرمافزار استاندارد ROS MoveIt! و ثبت و ذخیره اطلاعات سنسور ربات (تصاویر دوربین، زاویههای مفصل، گشتاورهای مفصل و غیره) در دسترس است.
ربات از سیستم جذب حرکت Noitom، Perception Neuron PRO استفاده میکند. این سیستم برای آموزش حرکات و یادگیری ماشین و همچنین کاربردهای کنترل از راه دور مورد استفاده قرار میگیرد.
سیستم ارائهدهنده اجتناب از تکینگی، حفاظت از خودتداخل و تابع محدودیت گشتاور هنگامی که ربات به طور فیزیکی محدود میشود (مثلاً وقتی که از بالا یک میز را فشار میدهد) است. همچنین دارای توابعی برای فعال/غیرفعال کردن کنترل بازوهای چپ و راست، گیرهها، گردن، کمر و پایه متحرک به صورت مستقل است، به گفته شرکت.