
ربات جدیدی که با نیروی ماهیچهای کار میکند: جهش بلندتر، واکنش سریعتر از همیشه

بیشتر رباتهای راه رونده امروزی با موتورهای الکتریکی کار میکنند. اما عصری جدید در حال ظهور است که در آن رباتها با ماهیچهها به جای موتورهای الکتریکی قدرت میگیرند. ماهیچهها ممکن است به رباتها حرکت و انعطافپذیری مشابه با موجودات زنده بدهند.
و محققان موسسه فناوری زوریخ و موسسه ماکس پلانک در حال کار برای ممکن ساختن این ایده هستند. آنها یک پای رباتیک کوچک مقیاس توسعه دادهاند که ساختار عضلانی حیوانات را تقلید میکند.
جالب آنکه، این پای رباتیک با نیروی ماهیچهای میتواند حرکات پیچیدهای مانند جهش و تطابق با زمین ناهموار انجام دهد.
«اگر ما این پای رباتیک را در یک ربات چهارپا یا یک ربات دوپا ترکیب کنیم، شاید یک روز، وقتی با باتری کار کند، بتوانیم آن را به عنوان یک ربات نجات به کار بگیریم»، گفت رابرت کاتسچمن، یکی از توسعه دهندگان ارشد از موسسه فناوری زوریخ.
چگونه کار میکند
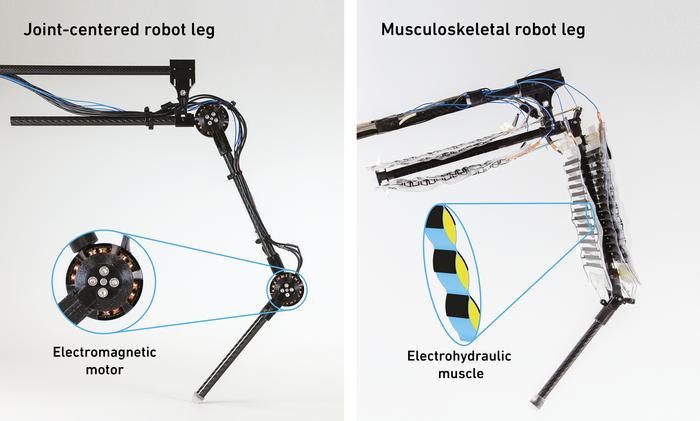
این پای رباتیک «ماهیچهای-عضلانی» که از حیوانات الهام گرفته، با استفاده از ماهیچههای مصنوعی اکستنسور و فلکسور حرکت میکند.
این پا با محرکهای الکتروهیدرولیکی که از طریق تاندونها به اسکلت ربات متصل اند، قدرت میگیرد.
در این اطلاعیه آمده که محرکها کیسههای پلاستیکی پر از روغن هستند که شبیه به آنهایی که برای ساخت مکعبهای یخی استفاده میشوند. علاوه بر این، یک الکترود سیاه و رسانا به طور جزئی دو طرف هر کیسه را میپوشاند.
توماس بوچنر، همکار این مطالعه، توضیح داد که «به محض اینکه ما ولتاژ را به الکترودها اعمال میکنیم، آنها به دلیل نیروی الکتروستاتیک به یکدیگر جذب میشوند. به همین صورت که وقتی یک بادکنک را به سرم میمالم، موهایم به بادکنک میچسبند به خاطر همان نیروی الکتروستاتیک.»
ولتاژ اعمال شده به الکترودهای محرکها حرکت آنها را تعیین میکند. هنگامی که ولتاژ افزایش مییابد، الکترودها به هم نزدیکتر میشوند و روغن به داخل محرک جابجا میشود و کیسه کوتاهتر میشود.
زمانی که محرکها روی یک اسکلت قرار گیرند، این حرکات «ماهیچههای جفت شده موجودات زنده» را با انقباض یکی و کشش دیگری تقلید میکنند.
یک کد کامپیوتری و تقویتکنندههای ولتاژ بالا برای کنترل انقباض یا کشش محرکها استفاده میشوند.
پای رباتیک کم مصرف
جالب است که نمونه اولیه پای رباتیک قادر به جهش است به دلیل قابلیت آن در بلند کردن وزن خود به صورت انفجاری.
محققان برجسته کردهاند که قابلیت انطباق بالای پای رباتیک میتواند برای توسعه رباتهای نرم پیشرفته مفید باشد.
علاوه بر این، این سیستم ماهیچهای-عضلانی «الاستیک» است و امکان انطباق انعطافپذیر با زمین را فراهم میکند.
«این چیزی است که با موجودات زنده نیز تفاوتی ندارد. اگر نمیتوانیم زانوهایمان را خم کنیم، به عنوان مثال، راه رفتن روی سطح ناهموار بسیار مشکلتر میشود. کافی است فکر کنید که بخواهید از پیادهرو بلند شده و به کف جاده قدم بردارید»، گفت کاتسچمن.
برخلاف موتورهای الکتریکی که برای تعیین موقعیت پا به حسگر وابستهاند، ماهیچه مصنوعی از طریق تعامل با محیط به موقعیت مناسب انطباق پیدا میکند. این انطباق تنها با دو سیگنال ورودی کنترل میشود: یکی برای خم شدن و دیگری برای کشش مفصل. این قابلیت اجازه میدهد تا سیستم ماهیچهای-عضلانی پای رباتیک به سطح فرود انطباق پیدا کند.
از نظر بهرهوری انرژی، پای رباتیک جدید کارآمدتر نسبت به پای رباتیک استاندارد است که با موتور الکتریکی کار میکند.
«در تصویر مادون قرمز، میبینیم که پای موتوری هنگامی که باید در حالت خم شده بماند، انرژی بسیار بیشتری مصرف میکند»، بوچنر اضافه کرد در این اطلاعیه مطبوعاتی.
خواص الکتروستاتیکی ماهیچه مصنوعی دمای پایدار در پای الکتروهیدرولیکی را تضمین میکند.
محققان اذعان دارند که سیستم فعلی آنها، با وجود اینکه نویدبخش است، دارای محدودیتهایی در جهش است.
آنها برنامه دارند تا این محدودیتها را برطرف کنند و رباتهای کاملاً عملی با ماهیچههای مصنوعی توسعه دهند.
این مطالعه در مجله
Nature Communications.



