
دست رباتیکی با چهار انگشت بسیار ماهر قابلیت چرخش بدون وزنه را ارائه میدهد
تیمی از محققان دانشگاه بریستول دست رباتیکی با چهار انگشت بسیار ماهر با نوکهای مصنوعی حساس ساختهاند.
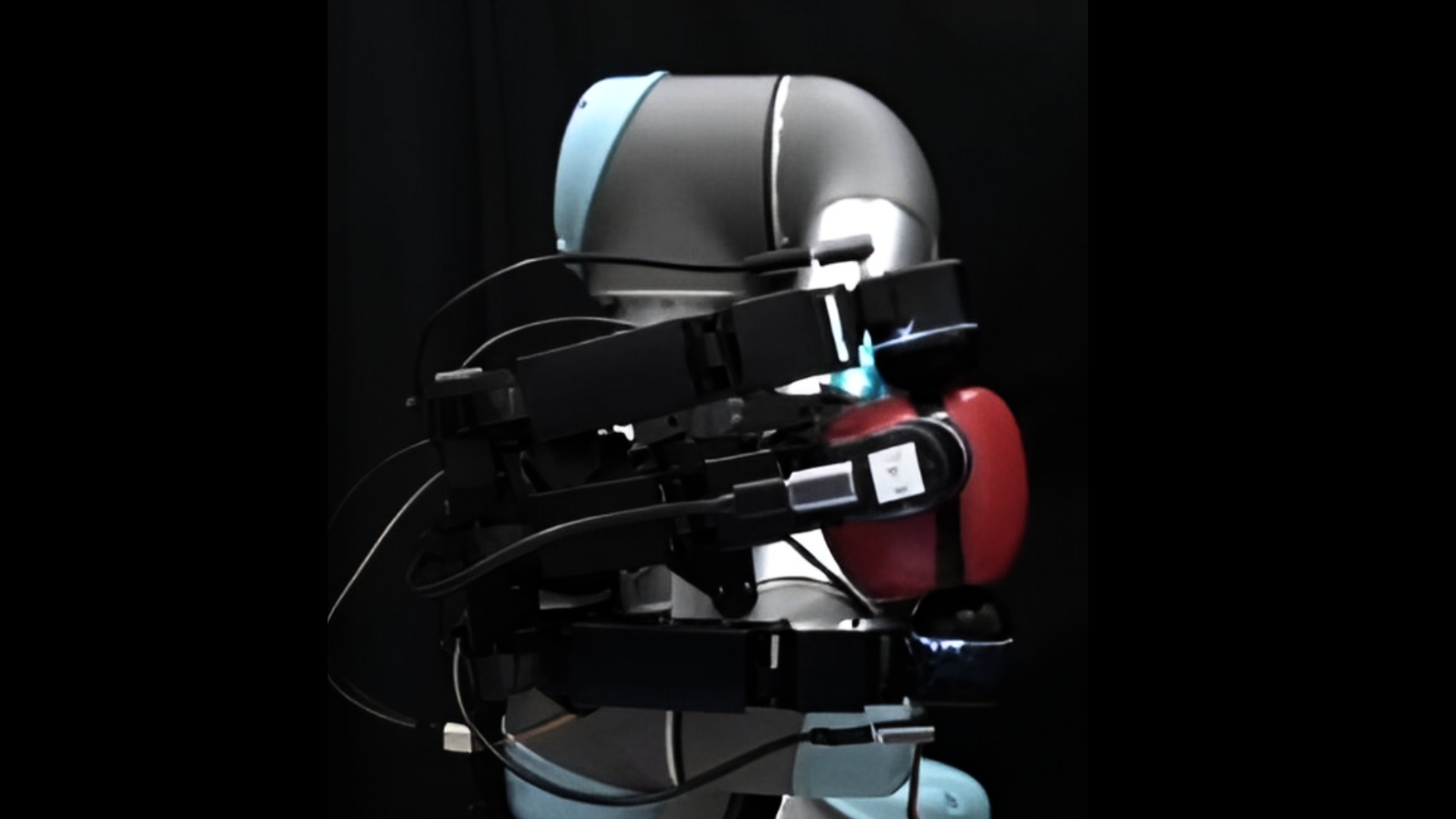
دست رباتیکی آنها به نام AnyRotate میتواند اشیا را در هر جهت و موقعیتی احساس و بچرخاند، حتی زمانی که دست وارونه باشد — قابلیتی که تاکنون هرگز به دست نیامده بود.
این سطح از مهارت برای یک دست رباتیکی نیازمند استخراج و استفاده از اطلاعات غنی لمسی برای کنترل دقیق موتور بود.
محققان پیشنهاد میکنند که افزایش مهارت دستهای رباتیکی میتواند وظایف خودکار مانند مدیریت محصولات سوپرمارکت یا مرتبسازی زبالههای بازیافتی را پیشرفت دهد.
جزئیات تحقیقات تیم در گیتهاب منتشر شده است.
پیشبرد مهارت رباتها
پیشرفت دستکاری ربات شامل چالشهایی در دستکاری درون دستی با دستهای چند انگشتی به دلیل پیچیدگی عملیاتی، کنترل دقیق و عدم قطعیتهای محیطی است.
پیشرفتهای اخیر، به ویژه توسط OpenAI، به سیستمهای بصری متکی است که مستعد انسداد خود هستند و نیاز به دوربینهای متعدد دارند. حسگری درونی و لمسی برای چرخش اشیا پدیدار شدهاند که برای دستکاری فضایی حتی در حین حرکت بسیار مهم هستند و نیازمند درک فیزیک پیچیده و چسبندگی غیر وابسته به جاذبه هستند.
طبق گفته محققان، حسگری لمسی که برای تعامل دقیق ربات و اشیا ضروری است، با شکافهایی بین شبیهسازی و واقعیت روبرو است که استفاده از دادههای با وضوح بالا را محدود میکند. نمایندگی لمسی پیشرفته قول مهارت بیشتر و قابلیتهای توسعه یافته در وظایف درون دستی را میدهد که پتانسیل پیشرفتهای آینده را نشان میدهد.
با استفاده از حسگری لمسی پیشرفته، تیم یک سیستم رباتی برای چرخش اشیا در دست از طریق چندین محور بدون تأثیر جاذبه توسعه دادند. آنها یادگیری تقویتی هدفمند (RL) را با بازخورد تراکم لمسی ترکیب کردند.
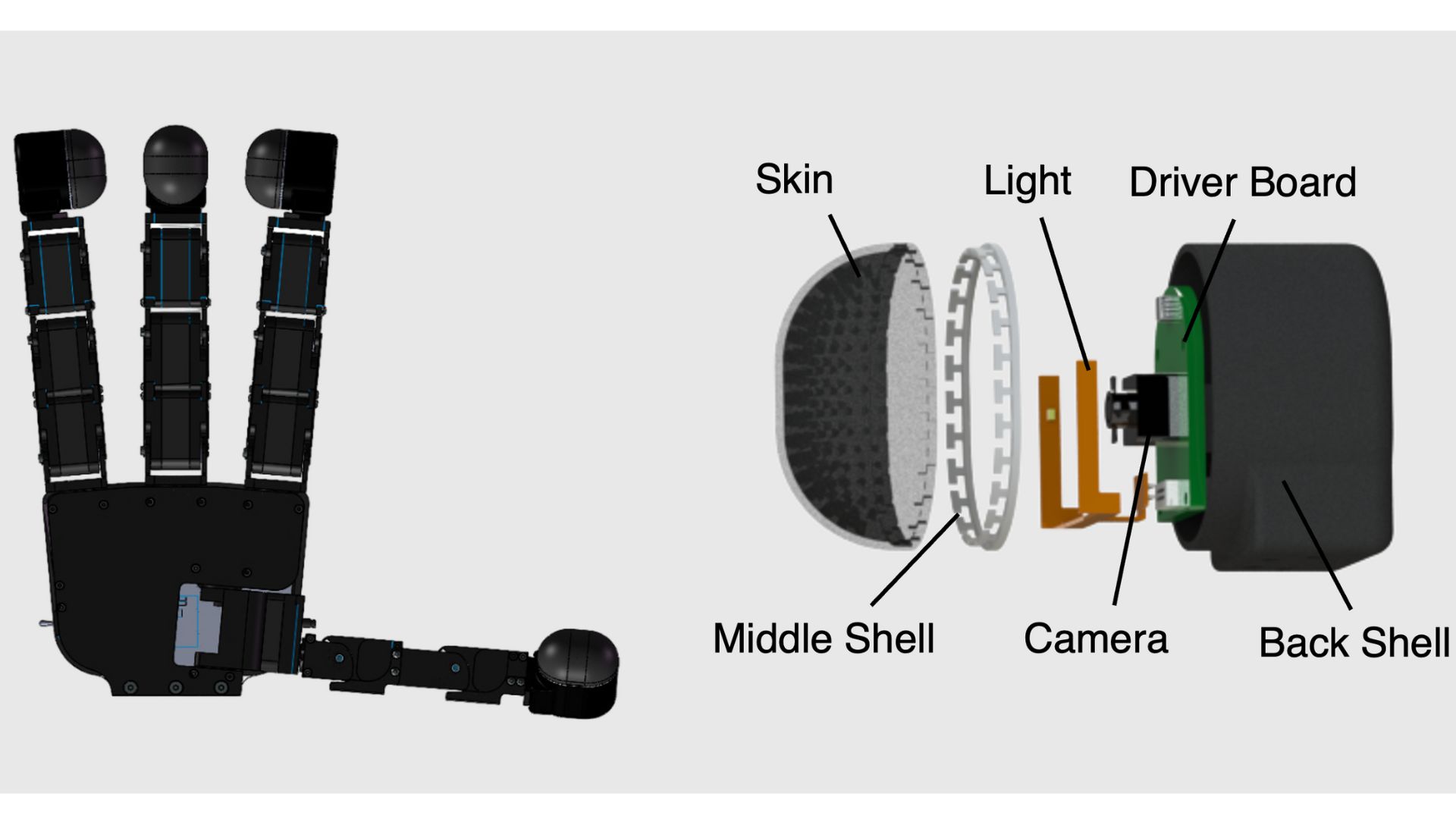
“در بریستول، نوک انگشت مصنوعی ما از یک توری چاپ سه بعدی با پاپیلاهای سوزنی روی زیر سطح پوست، بر اساس کپی کردن ساختار داخلی پوست انسان، استفاده میکند،” گفت پروفسور نیتان لپورا از دانشگاه در بیانیهای.
در ابتدا، محققان چهارچوبی برای انتقال از شبیهسازی به دنیای واقعی ایجاد کردند و نمایندگی لمسی دقیقی برای آموزش سیاست دقیق برای دستکاری اشیا در چندین محور توسعه دادند.
سپس، آنها مدل مشاهداتی را برای پیشبینی حالت تماس و نیروی از تصاویر لمسی، که برای دستکاری پایدار در محیطهای پر سر و صدا حیاتی است، آموزش دادند. در کاربردهای دنیای واقعی، آنها یک دست رباتی چهار انگشتی با حسگرهای لمسی در نوک انگشتها را تجهیز کردند تا چرخش اشیا در دست به طور پایدار و دقیق انجام شود.
حسگری لمسی پیشرفته
در آزمایشات دنیای واقعی، سیاست لمسی تراکم تیم بهطور مؤثری با اشیای مختلف برخورد کرد و آنها را در جهات مختلف بهتر از روشهای لمسی سادهتر چرخاند.
به طرز شگفتانگیزی، حتی بدون شناسایی خاص لغزش، حسگرهای لمسی پیشرفته میتوانند زمانی که اشیا شروع به حرکت میکنند را حس کرده و به طور متناسب تنظیم کنند. به گفته محققان، این نشان میدهد که چقدر حسگری لمسی دقیق توانایی ما برای دستکاری اشیا با اطمینان در دست افزایش میدهد و نقش حیاتی آن در رباتیک را تاکید میکند.
این مطالعه سیاست عمومی با استفاده از حسگری لمسی پیشرفته برای چرخش اشیا در دست در هر محور و جهتی را نشان داد که یک نقطه عطف در مهارت رباتیک است.

در حالی که لمس تراکم بالا عملکرد خوبی داشت، از تصمیم گرفتن با اشیای شکل جعبهشکل یا کشیده به دلیل بازخورد لمسی مشابه از نقاط مختلف چسبندگی مشکل داشت. بهبود نمایشهای لمسی با تصاویر لمسی، میدانهای نیروی تماس، یا ادغام دید میتواند پایداری را بهبود بخشد.
محدودیتهای کاری دست Allegro در برخی جهتها نیاز به سختافزارهای با قابلیت بیشتر و مقرون به صرفهتر را برجسته میکند. دستیابی به دستکاری بدون زحمت اشیا در فضا از طریق بازخورد لمسی اهداف مهارت انسانی را تکرار میکند و اهمیت حسگری لمسی برای پیشرفتهای آینده در رباتیک را برجسته میکند.



